Part 1: Setup & Operation 8. Motion Range and Robot Coordinates
41
8.2 Pulse range
The manipulator’s motion range is controlled by the pulse lower limit and upper limit of
each joint. Pulse values are read from the servo motor’s encoder output. Here, we show
the pulse range of each joint.
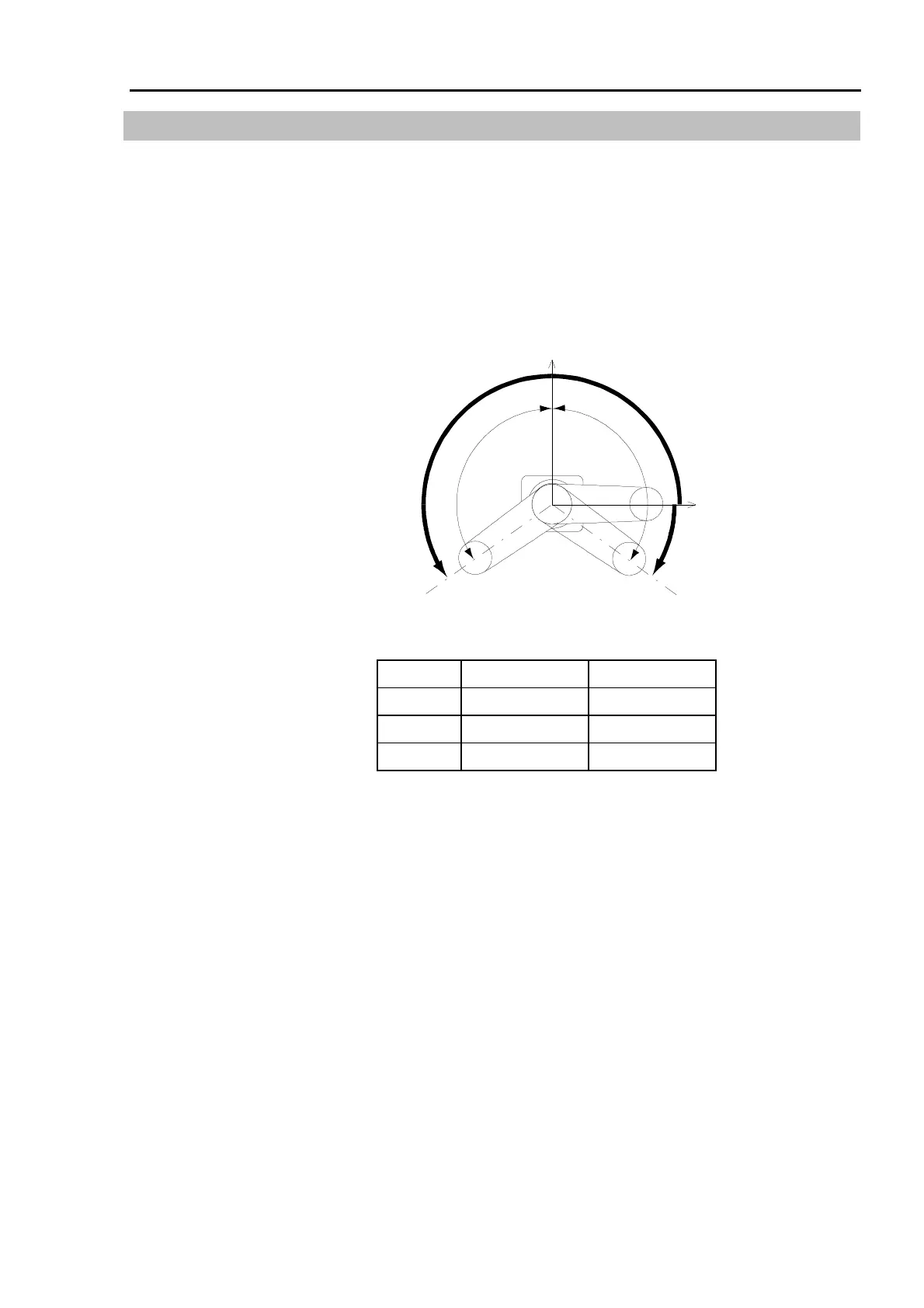
The 0 (zero) pulse position of Joint #1 is the position at which Joint #1 faces in the positive
direction of the X-coordinate axis. The pulse value is positive (+) in the counterclockwise
direction from the 0 pulse position and negative (-) in the clockwise direction.
+Y
+X 0 pulse
C pulse B pulse
A°
A°
ES series EL series
A°
125° 130°
B pulse
-31858 -45512
C pulse
+195698 +250312
Figure 23. Pulse range of Joint #1