8. Motion Range and Robot Coordinates Part 1: Setup & Operation
54
(3) Changing motion range using X, Y limits
Use this method to set the upper and lower limits of the X and Y coordinates.
WARNING
This setting applies only to the software, so it does not change the physical
range. The maximum physical range is based on the positions of the
mechanical stops.
If you need to change this setting for ES45**/EL65**, you must be careful because the end
effector may hit the rear side of the manipulator depending on the motion.
Set the X Y range by using the XYLIM tab in the Project | Robot Parameters dialog.
(Refer to the chapter EPSON RC+ GUI in the EPSON RC+ User’s Guide.) You may also
execute the XYLIM command from the EPSON RC+ Monitor Window.
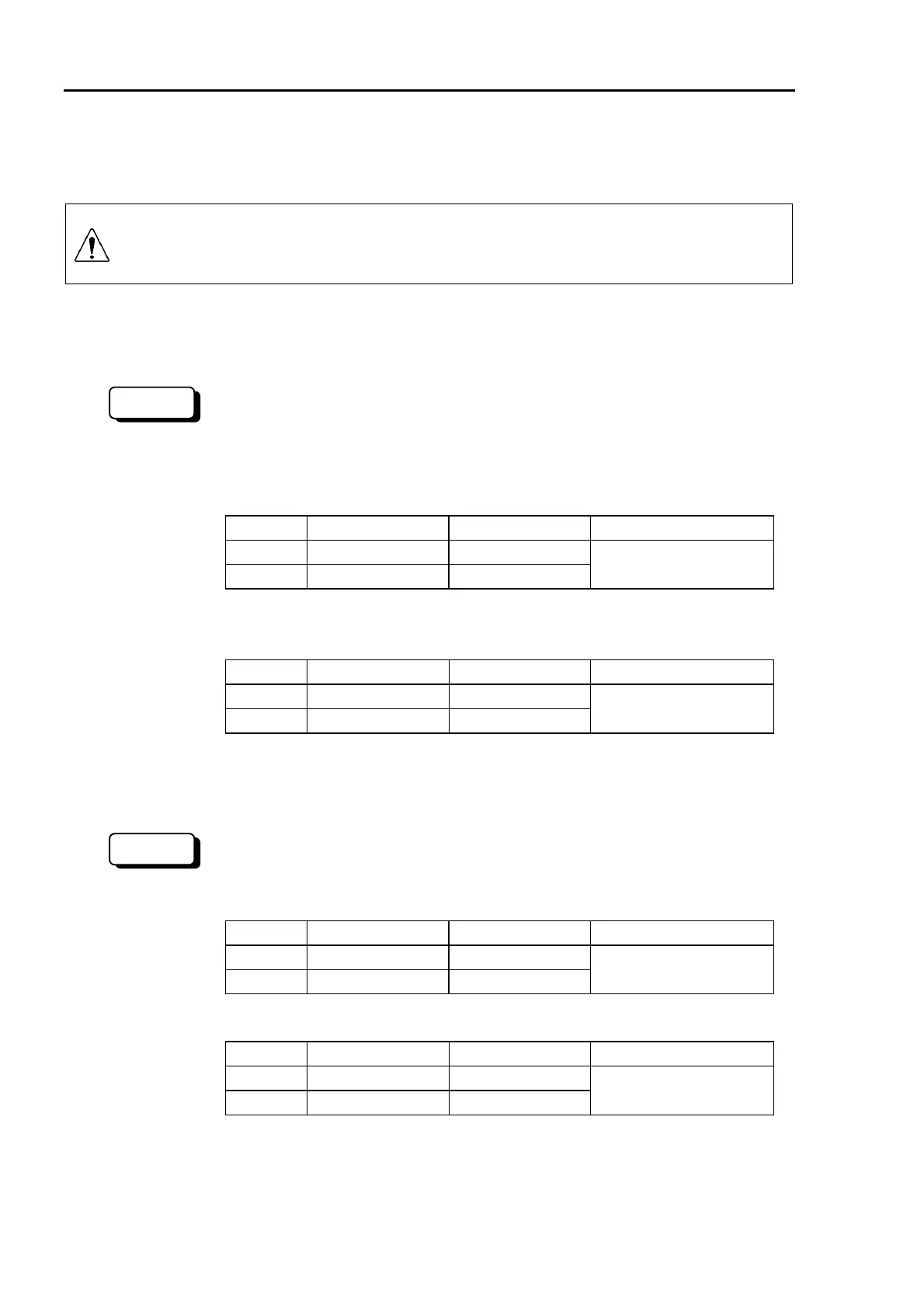
For only ES45**, at the factory shipping, it is set as follows:
coordinate lower limits [mm] upper limits [mm] Refer to
X -90 90
Y -450 0
Figure 21-1 in this chapter
For only EL65**, at the factory shipping, it is set as follows:
coordinate lower limits [mm] upper limits [mm] Refer to
X -120 120
Y -650 0
Figure 22-1 in this chapter
For example:
>XYLIM -90,90,-450,0
Set the X Y range by using the [XYLIM] panel. For details on the [XYLIM] panel, Refer
to Chapter 11, section Setting the Robot Parameters in the User's Guide.
For only ES45**, at the factory shipping, it is set as follows:
coordinate lower limits [mm] upper limits [mm] Refer to
X -90 90
Y -450 0
Figure 21-1 in this chapter
For only EL65**, at the factory shipping, it is set as follows:
coordinate lower limits [mm] upper limits [mm] Refer to
X -120 120
Y -650 0
Figure 22-1 in this chapter
For example:
>XYLIM -90,90,-450,0
RC+
SPEL 95
NOTE
 Loading...
Loading...









