10. Specifications Part 1: Setup & Operation
62
*3 : When the center of gravity is at the center of the Joint #4. If the center of gravity is not at the
center of Joint #4, speed and acceleration must be reduced.
*4 : Operation conditions of manipulator during measurement:
Under the rated load, 4-joints simultaneous motion, maximum speed, maximum acceleration,
duty 50%.
Measurement point:
At the front of manipulator, 100 mm apart from the motion range, 50 mm above the
base-installed surface.
10.3 Model settings
To set the manipulator model using the EPSON RC+ system, use the Setup | System
Configuration | Robots tab. Refer to the chapter “Robot Configuration” in the EPSON
RC+ User’s Guide.
When setting the manipulator model using the SRC5** controller, select the model with the
[ Basic Settings ] panel that is displayed when [ Setup ] - [Robot Manipulator Settings] is
executed. Refer to Chapter 11 in the User's Guide for the section Setting the Robot
Paramters.
Manipulator models used with the controller SRC-3** are pre-set by DIP switch SD1 on the
MPU board in the controller. Be sure not to change the DIP switch settings. Also, if an
MT label is attached, the manipulator has custom specifications, and settings may differ
from those described above. When making an inquiry, please note the custom
specifications number on the MT label.
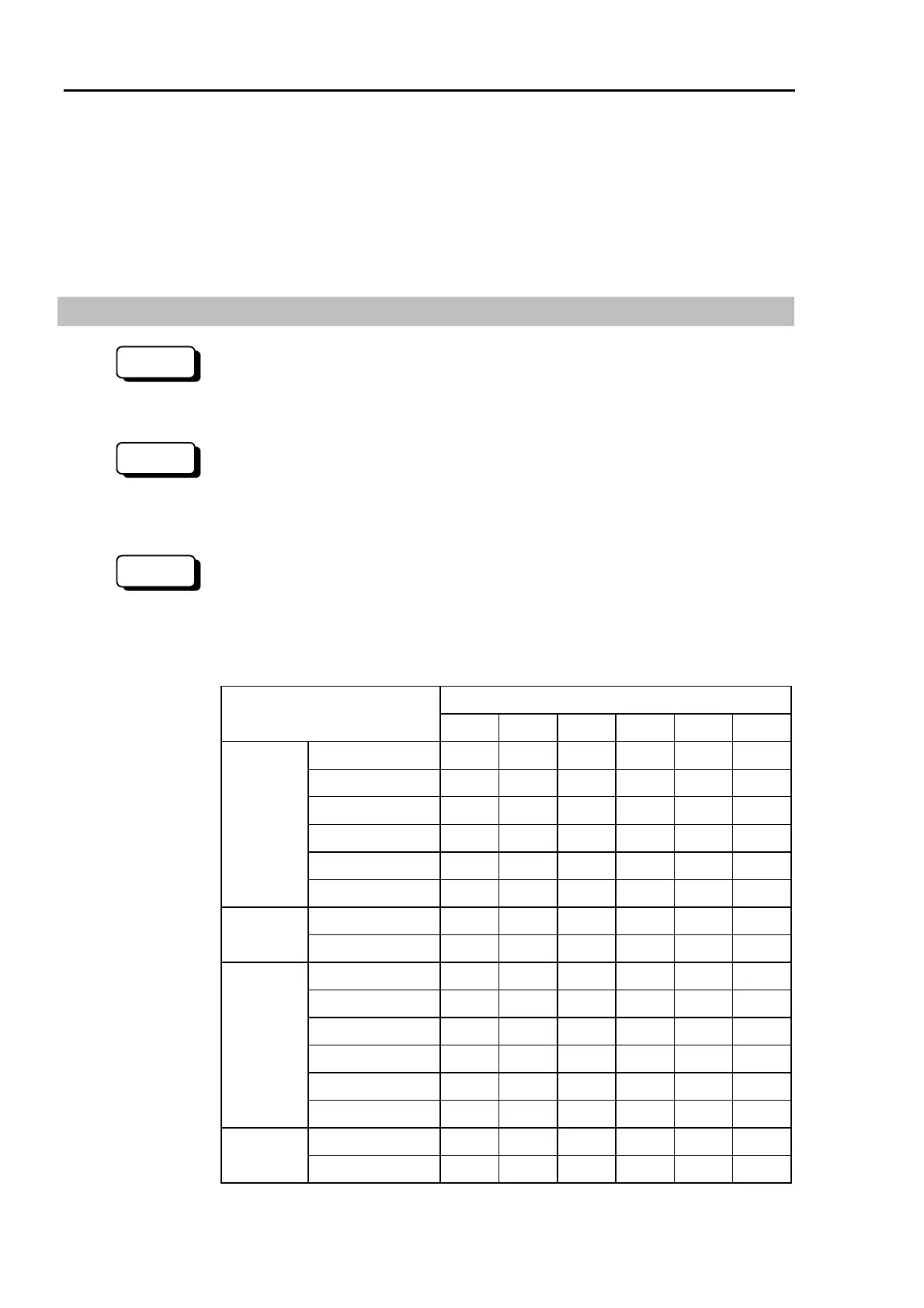
DIP switch SD1 (model select switch) setting
Model name
bit 3 bit 4 bit 5 bit 6 bit 7 bit 8
ES451S - ON - - - -
ES551S - - ON - - -
ES651S - ON ON - - -
ES453S - ON - ON - -
ES553S - - ON ON - -
ES***S
ES653S - ON ON ON - -
EL653S - ON - - ON - EL***S
EL853S - - ON - ON -
ES451C/ES451P ON ON - - - -
ES551C/ES551P ON - ON - - -
ES651C/ES651P ON ON ON - - -
ES453C/ES453P ON ON - ON - -
ES553C/ES553P ON - ON ON - -
ES***C/P
ES653C/ES653P ON ON ON ON - -
EL653C/EL653P ON ON - - ON - EL***C/P
EL853C/EL853P ON - ON - ON -
300
RC+
SPEL 95