8. Motion Range and Robot Coordinates Part 1: Setup & Operation
44
8.3 Changing the Motion Range
WARNING
Both the mechanical stop and the software settings must always be set at the
same time when a motion range is being set up.
* The motion ranges of Joint #3 of Clean model manipulator and all joints of
Protected model manipulator cannot be changed with mechanical stops.
The motion range is preset at the factory as explained in 8.1 Standard motion range in this
chapter. This is the manipulator’s maximum motion range.
It is possible to change the motion range for reasons of layout efficiency or safety. Make
any changes in the motion range in accordance with the following instructions.
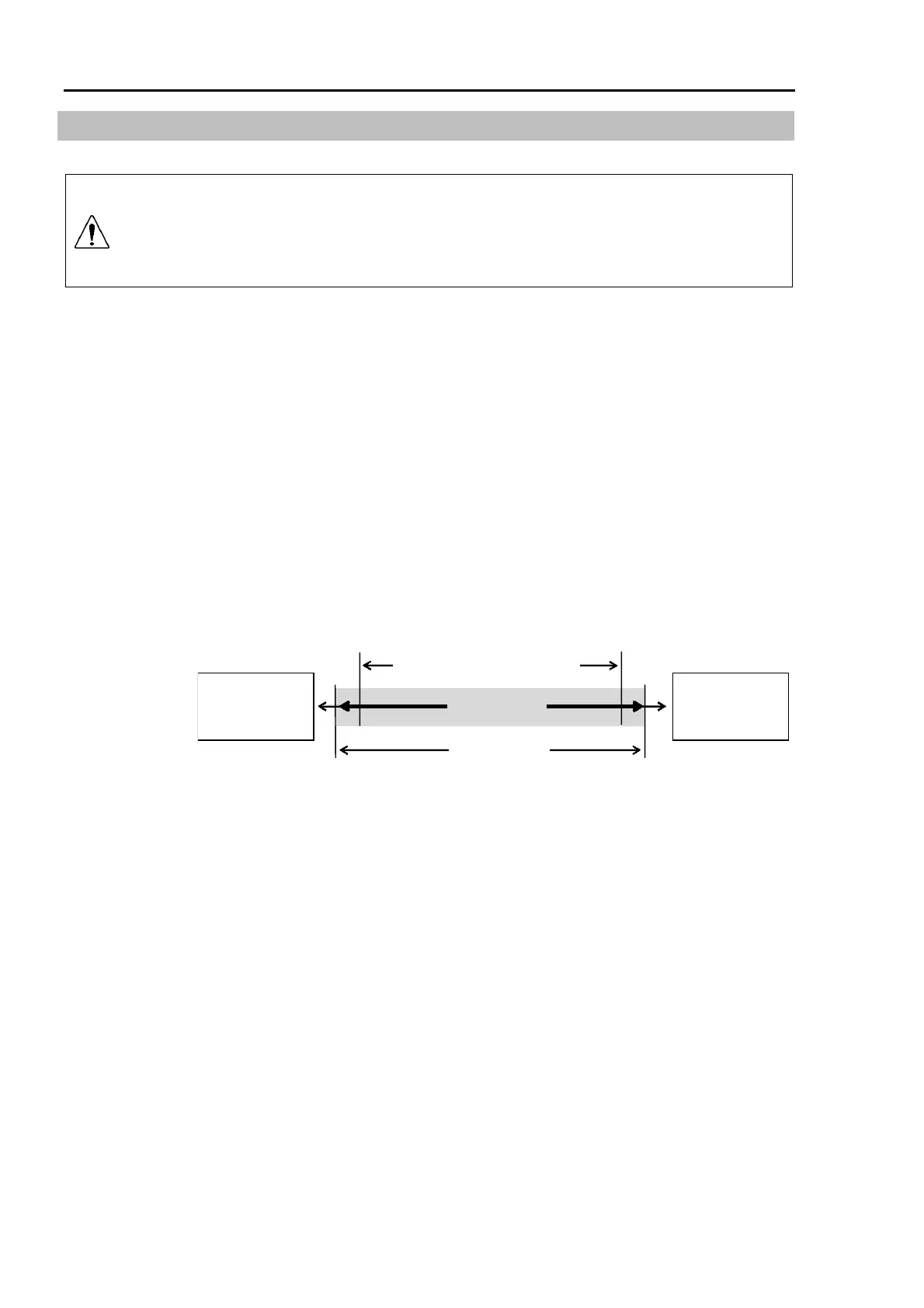
Methods of setting the motion range
You can set the motion range by doing any of the following:
(1) Set the pulse range (for all joints).
(2) Set the mechanical stops (for Joint #1 to #3 of Standard model, Joint #1 and #2 of
Clean model).
(3) Set the Cartesian (rectangular) range in the X, Y coordinate system of the robot (for
Joint #1 and #2).
(2) Mechanical
stop
(2) Mechanical
stop
(3) Rectangular range setting
(1) Pulse range
Motion range
Figure 27. Setting the motion range