8. Motion Range and Robot Coordinates Part 1: Setup & Operation
42
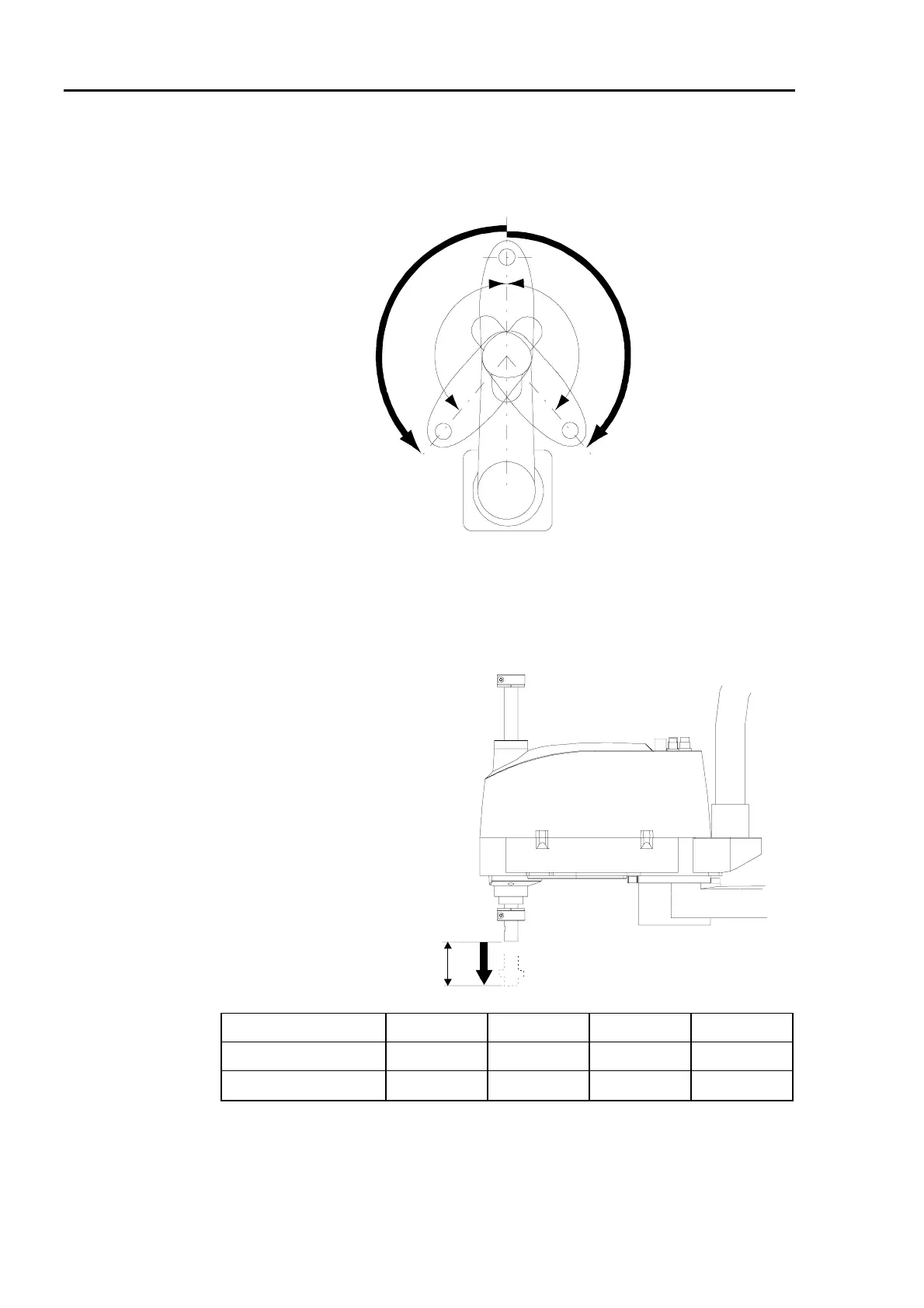
The 0 pulse position of Joint #2 is the position at which Joint #2 is parallel to Joint #1.
A positive (+) pulse value is taken in the counterclockwise direction from the 0 pulse
position, and a negative (-) pulse value is taken in the clockwise direction.
0 pulse
-140°+140°
-79645 pulse (ES)
-127432 pulse (EL)
+79645 pulse (ES)
+127432 pulse (EL)
Figure 24. Pulse range of Joint #2
The 0 pulse position of Joint #3 is the upper limit of Joint #3. Joint #3 descends from the 0
pulse position and the pulse is negative (-).
A
0 pulse
Manipulator ES**1S E***3S ES**1C/P E***3C/P
A: Joint #3 stroke (mm) 170 320 150 300
Pulse range (pulse)
0 ∼ -52224 0 ∼ -98304 0 ∼ -46080 0 ∼ -92160
Figure 25. Pulse range of Joint #3
 Loading...
Loading...









