IS810N-INT Series Servo System User Manual (Brief) Chapter 6 Commissioning Software
- 226 -
23. Use to commission the servo. Check whether the parameters are correct before using
the servo.
Figure 22
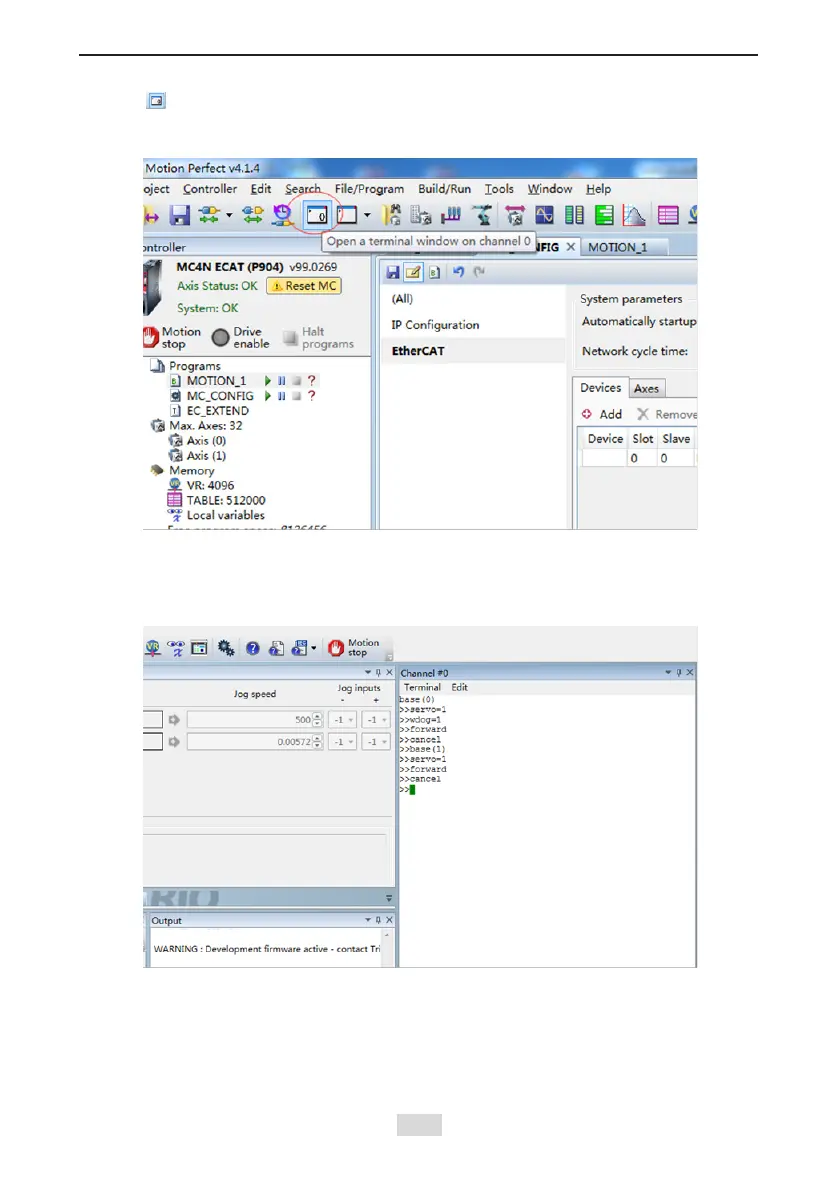
24. Enter the following in the terminal window: base (x) (select an axis address), servo=1
(closed-loop ETHERCAT bus), wdog = 1 (enable servo), forward (forward running),
reverse (reverse running), cancel (stop running).
Figure 23
 Loading...
Loading...