SV-DA200 series AC servo drive Faults and solutions
-262-
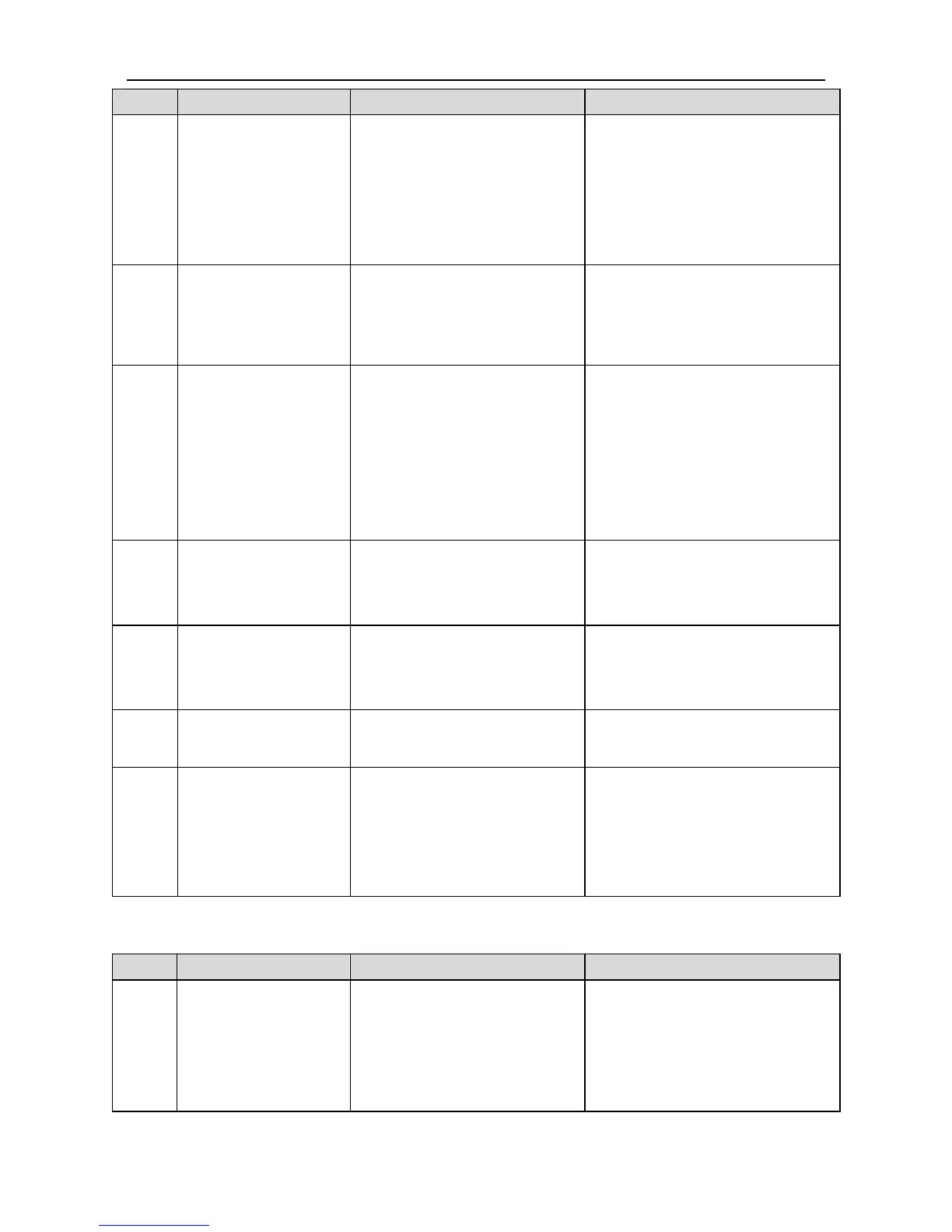
Position increment
overflow fault
In fully-closed loop control, the
deviation between the feedback
position of linear encoder and that
of the encoder exceeds the
setting value of P4.64
1.Check the connection between the
motor and load;
2. Check the connection between
linear encoder and the drive;
3.Check the setting of P4.60, P4.61
and P4.62.
Position increment
overflow fault
The position command of single
variation after converting via
electronic gear ratio exceeds
(2
31
-1).
1. Decrease the single variation
quantity of position command;
2. Modify the gear ratio to a proper
range.
Drive over-temperature
fault
1.The ambient temperature of the
drive exceeds the designated
value;
2. Drive overload.
1.Reduce the ambient temperature
and improve the ventilation
environment;
2. Replace with a servo system with
larger power;
3. Prolong the ACC/DEC time and
reduce the load.
Application
fault–Encoder offset
angle test failed
Abnormity occurred during
encoder offset angle test.
Check whether the motor shaft can
rotate freely, then repower on and
carry out.
Application fault–
Encoder offset angle test
failed
The current feedback wave
fluctuate violently during encoder
offset angle test
Reduce P4.53 parameter setting,
then repower on and carry out.
Application fault–
Offside of homing
Encounter the limit switch or
software limit during homing
Modify the setting of P5.10, repower
on and carry out.
Application fault–
Inertia identification
failed
1.Vibration in stopping exceeds
3.5s;
2. Too short ACC time;
3. The identification speed is
below 150r/min.
1.Improve the mechanical rigidity
properly;
2.Increase P1.07;
3.Increase P1.06.
9.2 CANopen communication fault code and countermeasures
Under interpolation position
mode, the time interval between
the two neighboring sync frame
signals exceeds twice of the
communication time cycle.
1.Check communication cable to
improve communication reliability;
2.Check whether the generation
interval of sync frame of sync signal
generation source is correct.

 Loading...
Loading...
