SV-DA200 series AC servo drive Faults and solutions
-255-
9 Faults and solutions
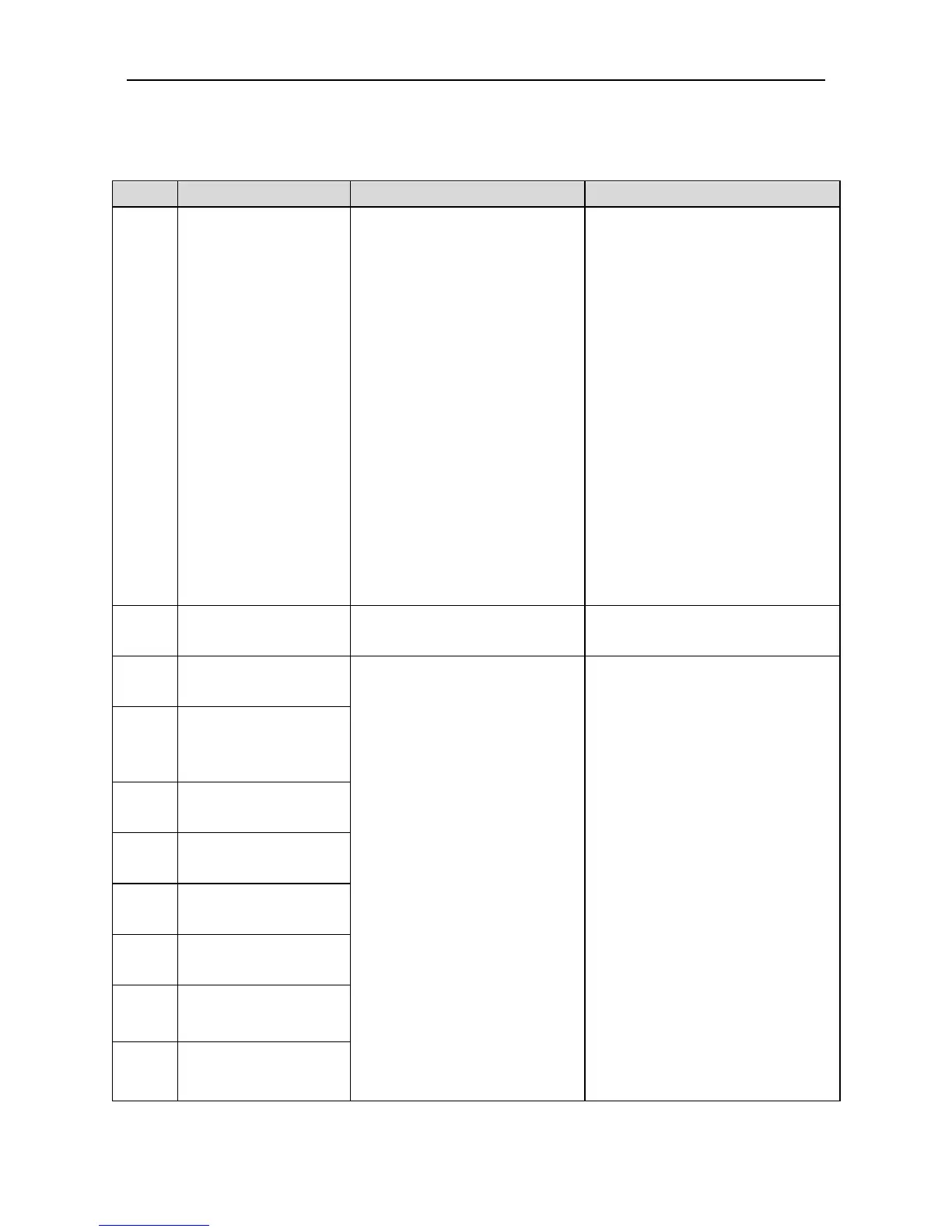
9.1 Meanings of the fault alarm code and countermeasures
The actual output current
exceeds the specified value
1.Drive fault (drive circuit, IGBT
fault);
2.Short circuit of motor cable U,
V, W, or the motor cable is
grounded or connected
improperly;
3. Motor burn down;
4. Reverse sequence of U, V, W
phase;
5. Parameters are inappropriate
and cause system divergence.
6. ACC/DEC of start/stop process
is too short;
7. Instantaneous load is too large.
1. Remove the motor cables and
enable the drive, if the fault persists,
replace the drive;
2.Check the motor cables and wiring
3.Reduce the value of P0.10 and
P0.11;
4.Comission the loop parameters to
stabilize the system and reduce the
value of P0.12;
5.Increase the ACC/DEC time;
6.Replace with the drive with larger
power;
7. Replace the motor.
Brake tube fault (7.5kW
and above models)
Encoder fault– The
encoder cable broken
1. The encoder is not connected;
2. The encoder connector
becomes loose;
3.One of U, V, W, A, B Z phase
cables is broken;
4. Reversed A/B phase of the
encoder;
5. Communication break or
abnormal data caused by noise;
6.Normal encoder communication
but abnormal communication
data;
7. FPGA communication overtime
8. The drive does not support the
encoder type.
1. Check the encoder connector or
replace the encoder cable if the
cable is disconnected;
2. Detect whether encoder power
voltage is normal;
3. Reduce the interference of the
encoder, route the encoder and
motor independently and connect
the shielded cables of the encoder to
FG;
4. If reporting encoder disconnection
fault when power on, check whether
the available drive encoder type is
consistent with the available motor
encoder type according to P0.01.
Encoder fault–Encoder
feedback error is too
large
Encoder fault– Parity
error
Encoder fault–CRC
check error
Encoder fault–Frame
error
Encoder fault–Short
frame error
Encoder fault– Encoder
overtime
Encoder fault –FPGA
overtime

 Loading...
Loading...
