The minimum current is monitored de-
pending on the setpoint in the stabilising
current axis.
The minimum current is monitored de-
pending on the level of the total current
setpoint.
I.e. if the total current setpoint is above
the minimum current, no additional stabi-
lisation current is supplied. This depend-
ency can cause the system to oscillate if
the position is misaligned, but has the
advantage that the motor is not heated
with additional current under load.
The compensation of the minimum current is in the range of -2*Imin...+2*Imin. If,
for example, the stabilisation current is adjusted via the Isd offset (ds55), it may not
be possible to compensate this via the minimum current function in order to
achieve the "set" sign.
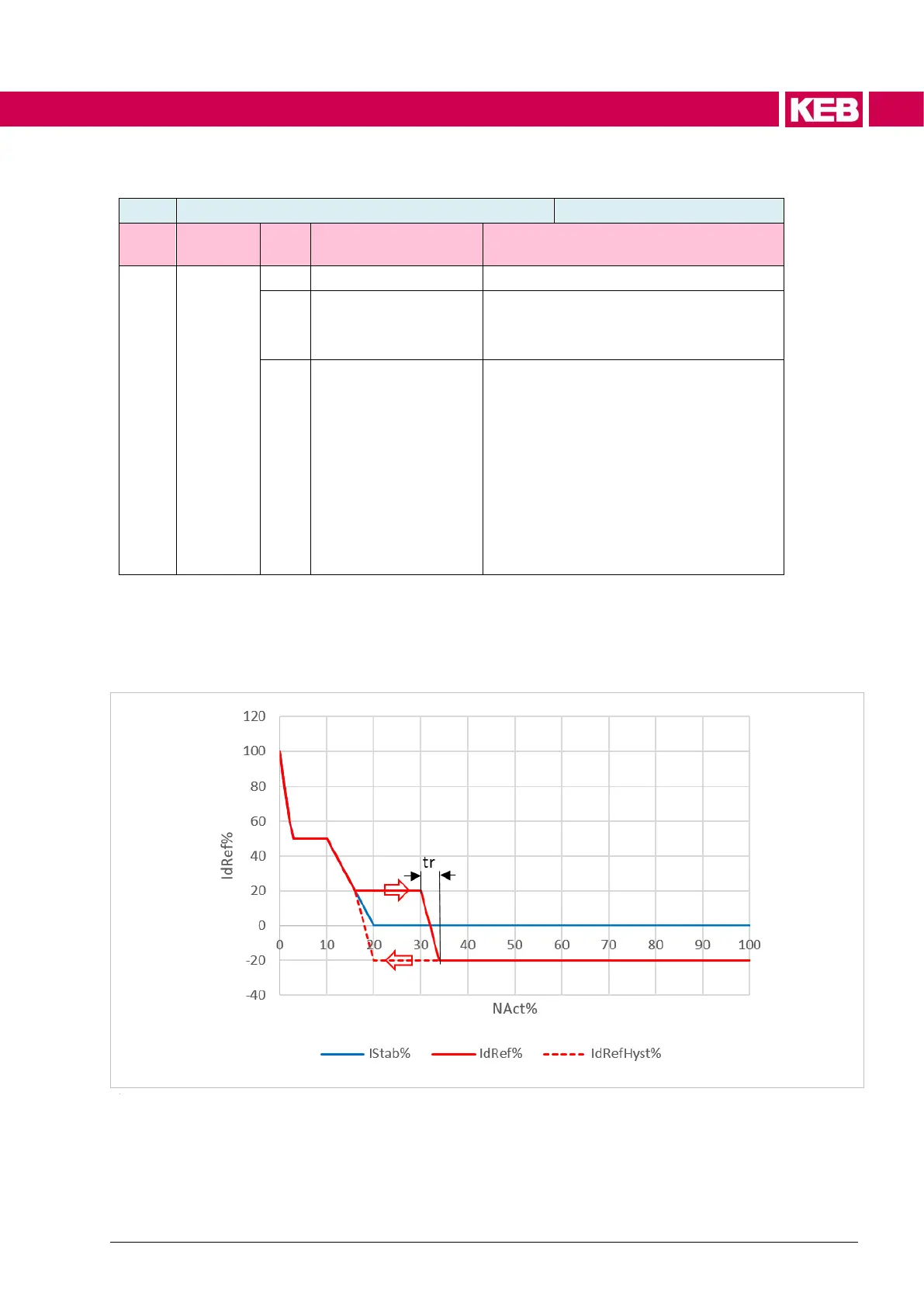
Figure 24: Minimum current course
SM/IPM without encoder with ramp time (tr, fc32[3]) and Imin=20% of rated motor
current, speed leakage values via stabilisation current (here ds38=100%,
ds35=50%, ds36=10%, ds37=20%). The speed hyteresis results from ds37 +
(ds37-ds36).

 Loading...
Loading...










