Further reduction occurs after the expiry of 30s if the heatsink temperature is too
high (if the derating lower limit has not been reached yet).
If the heatsink temperature (ru25 SubIdx 1 heatsink temperature 1) falls below the
temperature for switching frequency increase and if at least 30s have been elapsed
since the last temperature-dependent reduction / increase of the switching fre-
quency, the switching frequency is increased to the next higher stage (Condition:
the switching frequency is lower than the set switching frequencyis10).
If the temperature is exceeded for the change-over to the rated switching fre-
quency, the switching frequency is immediately reduced to the rated switching fre-
quency (provided always the lower limit has not been reached yet).
After 30s it is checked whether the switching frequency can be increased again.
The 30s waiting time serves for transient oscillation of the temperature profile.
The current-dependent derating is always superimposed on the temperature-de-
pendent derating.
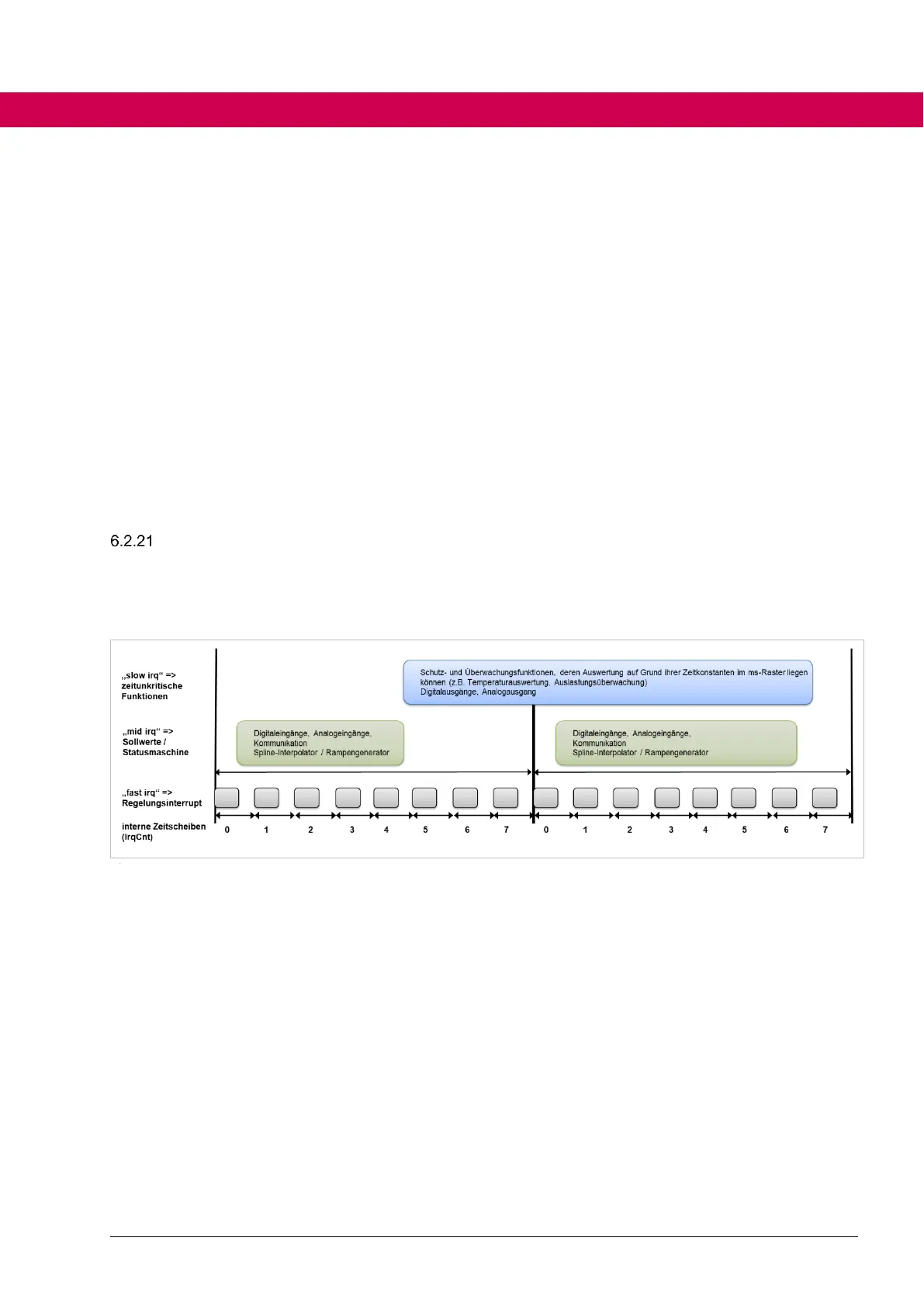
Interrupt structure of the software
6.2.21.1 Time allocation
Depending on their time priority, various functions of the inverter run in various
tasks (time slices, interrupt levels).
Figure 93: Time allocation
The fastest grid is the basic control grid (also called "basic Tp" or "fast irq"). The
basic control grid depends on the switching frequency group. It contains the essen-
tial control functions, e.g. for current, speed, etc.
Not all of these control functions are executed in every cycle (see chapter 6.2.21.2
Scan times of position, speed and current controller)
Above there is the middle grid ("mid irq"), in which a lot of the functions for pro-
cessing the communication (fieldbus, serial interface), for handling the status ma-
chine, for processing the setpoints and for error handling are processed.
The slowest grid ("slow irq") contains all functions that are not particularly time-criti-
cal (e.g. load and overload monitoring), but which nevertheless require a fixed pro-
cessing grid.

 Loading...
Loading...










