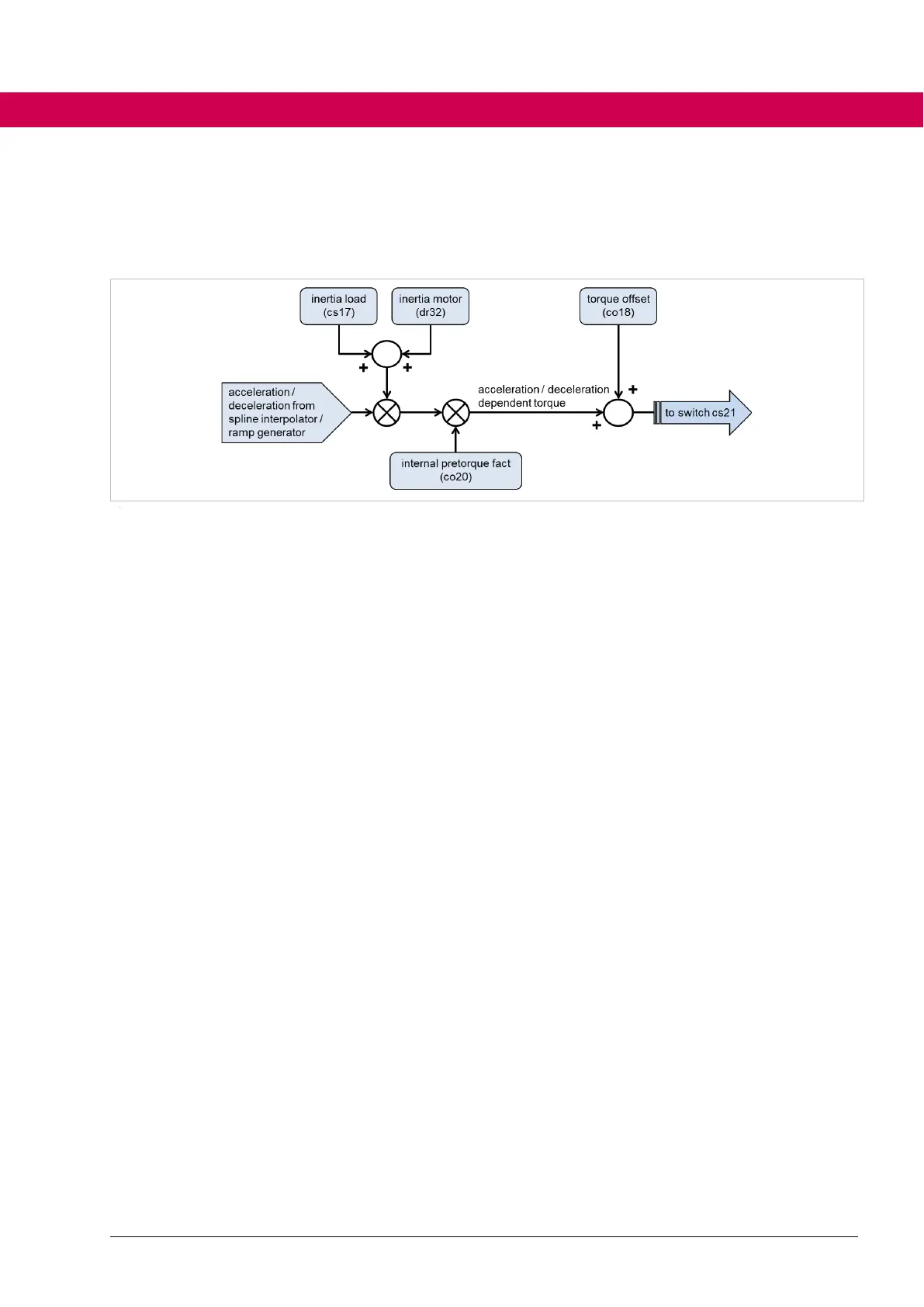
Mode 2: The torque precontrol is done directly from the actual operating mode. An
offset can be added via the control to this signal to realize (e.g.) additional, applica-
tion-specific precontrol. A change of the reciprocal of amplification is possible with
co20.
Figure 103: Torque precontrol mode 2
6.3.8.2 Torque precontrol reciprocal of amplification
The reciprocal of amplification of the acceleration/deceleration-dependent precon-
trol is adjustable. Parameter cs24 pretorque factor must be used in mode 1 and pa-
rameter co20 internal pretorque fact in mode 2.
Not always the best control result is reached with the precontrol reciprocal of ampli-
fication of 100%. This is partly due to the inaccuracy or change of the inertia, but
also partly on the behaviour of the total control circuit. The required torque (motor
and regenerative) can be different at the same acceleration (e.g. due to friction).
The control performance is significant improved with correctly adjusted precontrol.
6.3.8.3 Torque precontrol smoothing
Torque peaks, caused by discontinuous speed setpoint setting can be reduced by
a low pass filter. Also valid here: the higher the filter time (cs22 pretorque PT1
time), the better the smoothing but the precontrol is more undynamic and deceler-
ated.
An excessively decelerated precontrol can operate even against the speed control-
ler output and lead to vibration. The parameter for the precontrol filter is valid for
mode 1 and mode 2.

 Loading...
Loading...










