Torque precontrol
The required torque to accelerate/decelerate the drive can be calculated if the
mass moment of inertia of a drive is known.
Additionally, the torque can also be pre-controlled by the control via co18 (CiA
0x60B2) torque offset.
This function is defined with the following parameters.
Source selection for the torque precontrol
Filter time for torque precontrol (PT1 filter)
Time for speed setpoint difference
at cs21 pretorque
mode = 1
(CiA 0x60B2) torque
offset
Offset can be preset via the control
at cs21 pretorque
mode = 2
6.3.8.1 Torque precontrol mode
Different modes can be adjusted via cs21 pretorque mode:
Mode 1: The precontrol is determined from the setpoint speed difference in
the time of cs23 and the inertia.
Mode 2: The precontrol is calculated in the spline interpolator or ramp genera-
tor from the acceleration-/deceleration values and the inertia. Additionally the control
can preset an offset via co18.
Mode 1: Independent on the operating mode the torque precontrol is always gen-
erated from the difference of the speed setpoint and the previous value. Peaks in
the precontrol signal can be reduced by selecting a higher delta time (cs23 pre-
torque delta time). A change of the reciprocal of amplification is possible with cs24.
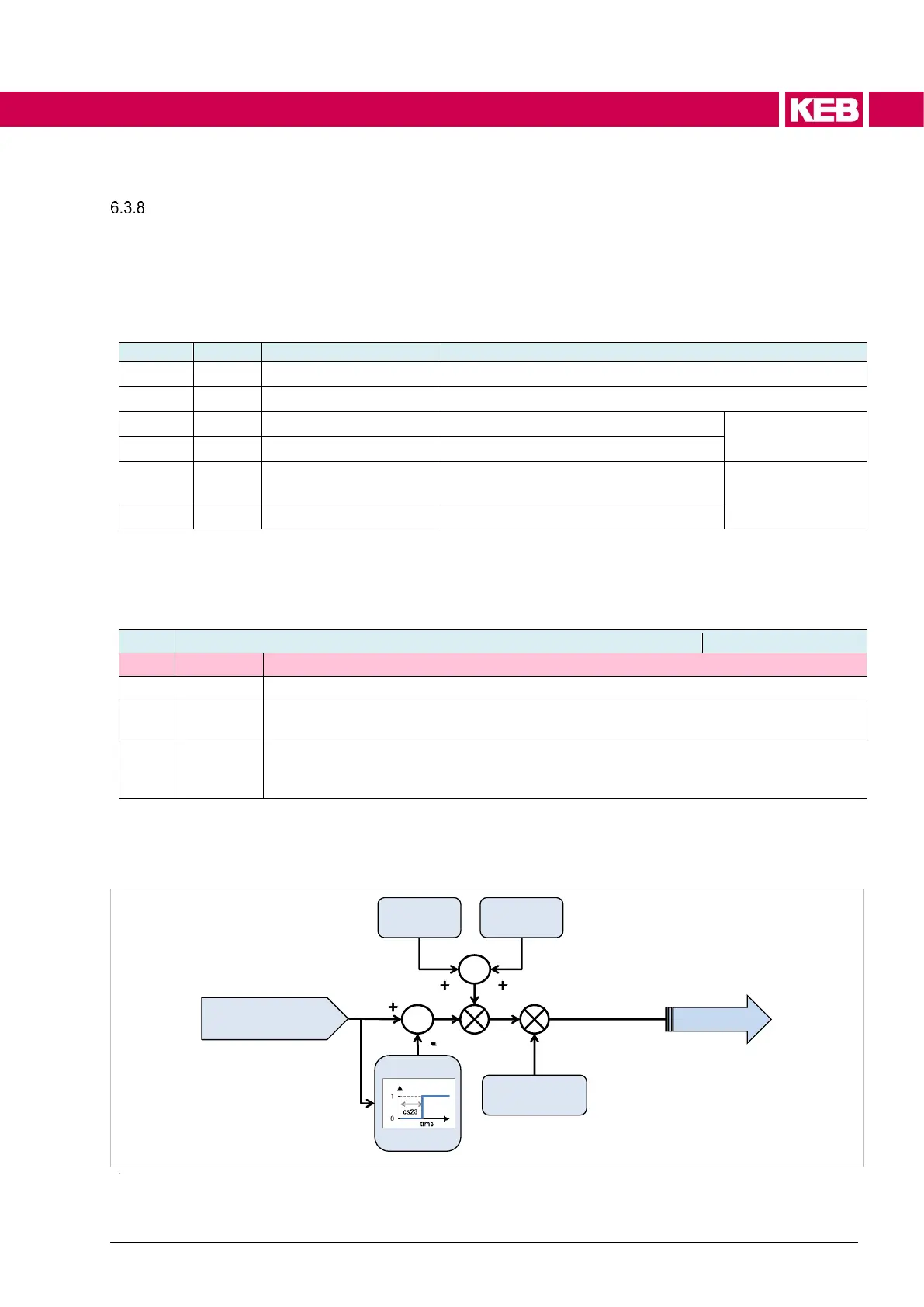
Figure 102: Torque precontrol mode 1
speed reference signal
before ref speed filter
Delay
time = cs23
inertia load
(cs17)
inertia motor
(dr32)
pretorque factor
(cs24)
to switch cs21
+
+ +
-
acceleration / deceleration
dependent torque

 Loading...
Loading...










