If a corresponding limit characteristic curve is specified for a motor, a safety dis-
tance should always be maintained to this curve, since all parameters have toler-
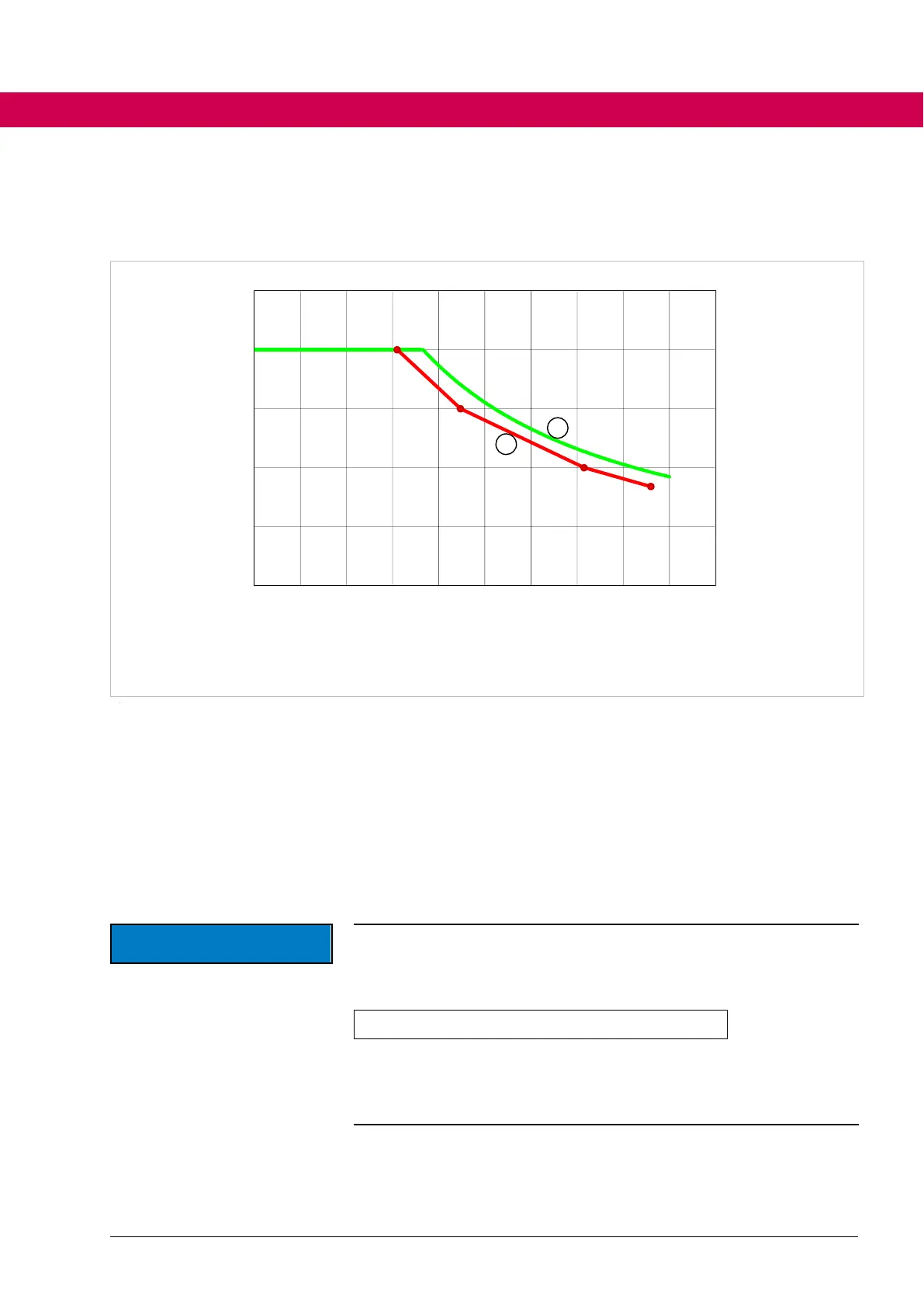
ances and temperature drifts.
Torque
Speed
M (single values measured)
M (calculated)
Figure 79: Safety distance to the limit characteristic
In practice, this optimal d-current can not be supplied because it is higher than the
maximum current of the motor or inverter (par example), or the limiting characteris-
tic due to saturation, iron losses or similar is not a 1/x characteristic.
Therefore the characteristic must be determined by tests in the application.
The value of dr25 should be selected lower than the measured value in order to
keep a safety distance.
➢ An error in the position detection leads to the fact that a torque is
generated by the magnetizing current.
➢ An error of 20° electrically causes an undesired torque by the mag-
netising current of maximum:
➢ The drive is uncontrollable if this missing torque due to the limiting
characteristic cannot be compensated by the speed controller.
➢ All torque limits must be selected high enough that the position error
can always be compensated.

 Loading...
Loading...










