Bit2-3 = 12 (reduction, on at FaultReact):
Behavior as for value 8 with one exception: In order to be able to reach the maxi-
mum torque during the fault reaction ramp, the limiting characteristic is shifted to-
wards higher speeds in the operating mode "fault reaction active" at higher DC link
voltage.
If in co61 torque lim mode bit 12 Uic dep. torque curve options is set to “1: at usage
of fault reaction ramp” this setting will also be valid if the fault reaction ramp is
used.
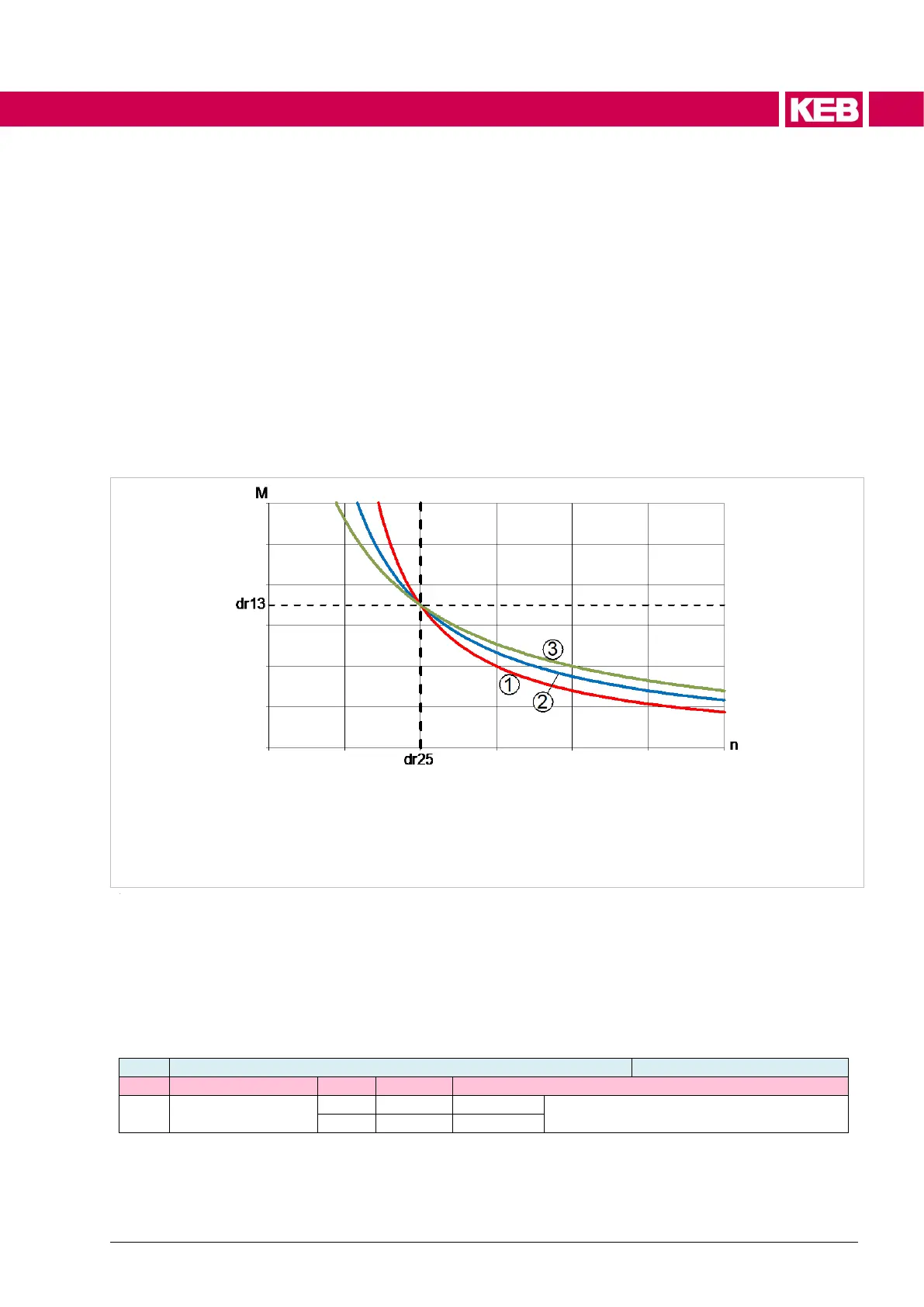
6.2.10.5 Adjustment of the torque limiting characteristic
Since the 1/x or 1/x
2
run of the limiting characteristic is only approximately, the
characteristic can be adjusted by ds13 torque limit curve factor.
Figure 77: Adjustment of the torque limiting characteristic
6.2.10.5.1 Asynchronous motor
The physical stall torque characteristic of the motor is a squared characteristic.
The squared limit characteristic must be activated if the motor shall be used upto
its limit (ds11 torque mode bit (0,1) = 1).

 Loading...
Loading...










