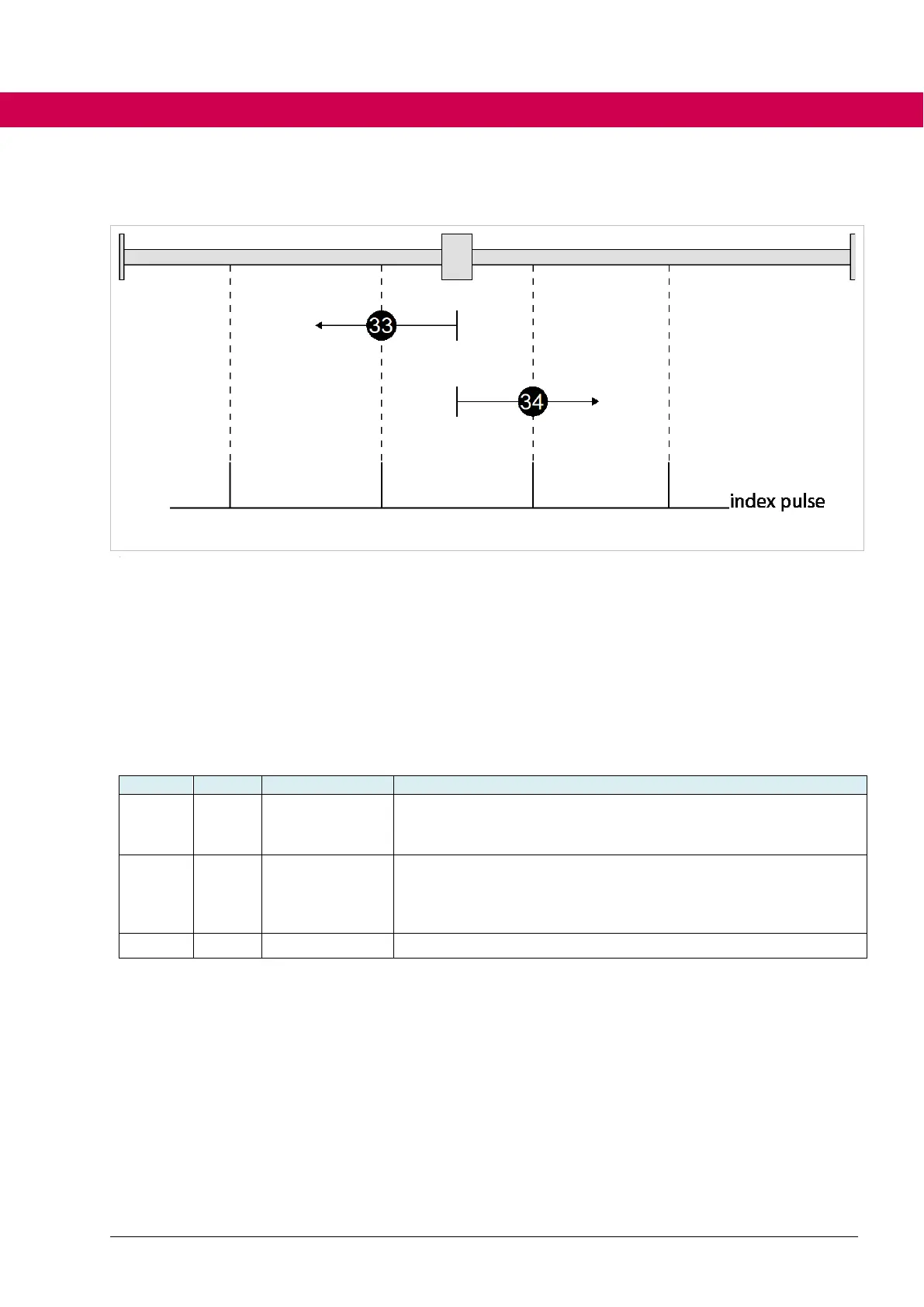
Figure 48: Homing – Method 33 and 34
4.8.3.5.8 Method 37 (35) Homing at current position
With this method, the drive does not move. The actual position is only overwritten
by the position value in hm00.
4.8.3.6 Zero signal offset
Distance needed for the last zero point search. The optimum is al-
ways a half revolution (32768 increments). The sign indicates the
direction of rotation.
The next zero point search is corrected with this offset. +/- half a
revolution can be corrected. With the value "-32768: auto" the op-
timal value for hm22 is automatically calculated from the meas-
ured value in hm21.
The additional referencing to the zero signal of the encoder increases the repro-
ducibility of the reference position after homing (homing methods 1...16). This re-
quires that the encoder is mechanically aligned to the reference limit switch so that
the zero signal is about half a revolution next to the edge of the reference limit
switch.
In addition to mechanical alignment, this adjustment can also be carried out by
software. For this purpose, the distance between the edge of the reference limit
switch and the edge of the zero signal is measured first. This distance is displayed
in hm21 zero point distance.
A value can now be preset via hm22 zero point offset in order to correct the zero
signal.
With the setting "-32768: auto“ the optimal value for the shifting of the virtual zero
pulse is automatically calculated from the position distance in hm21.

 Loading...
Loading...










