4.8.2.4.2 Jerk limiting
The maximum acceleration change (jerk) is parameterized via the following ob-
jects. The resolution of the values is 1/100 s
-3
= 0.01 s
-3
.
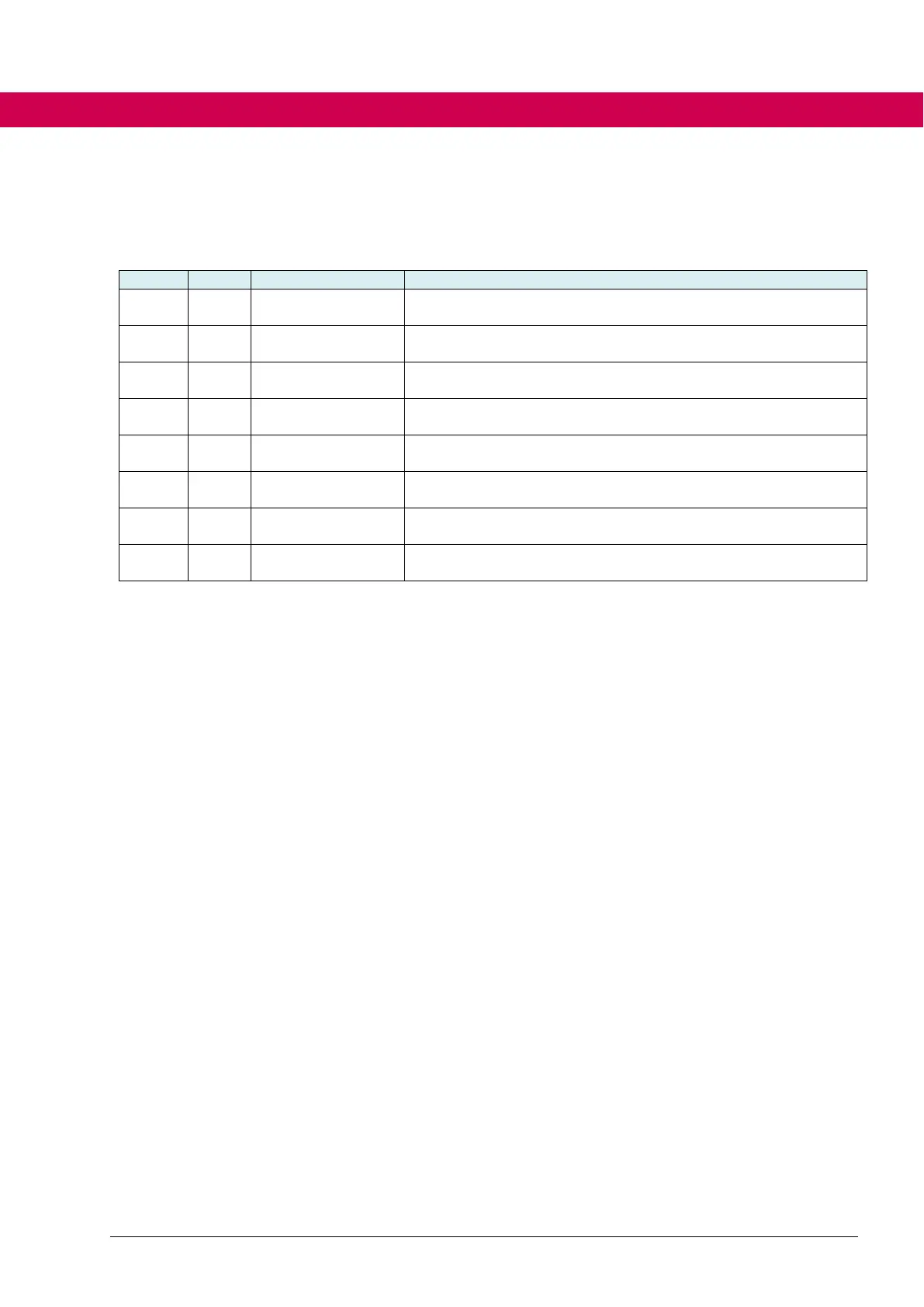
Maximum jerk at acceleration in FOR direction of rotation
(low speed)
Maximum jerk at acceleration in FOR direction of rotation
(high speed)
Maximum jerk at deceleration in FOR direction of rotation
(high speed)
Maximum jerk at deceleration in FOR direction of rotation
(low speed)
Maximum jerk at acceleration in REV direction of rotation
(low speed)
Maximum jerk at acceleration in REV direction of rotation
(high speed)
Maximum jerk at deceleration in REV direction of rotation
(high speed)
Maximum jerk at deceleration in REV direction of rotation
(low speed)
Example:
The acceleration in the previous example should be reached after one second.
r = Δa/Δt
In our case with constant jerk it is:
r = a / t = 16.67s
-2
/ 1s = 16.67 s
-3

 Loading...
Loading...










