4.8.8.2.2 Jerk limiting
The maximum acceleration change (jerk) is parameterized via the following ob-
jects. The resolution of the values is 1/100 s
-3
= 0.01 s
-3
.
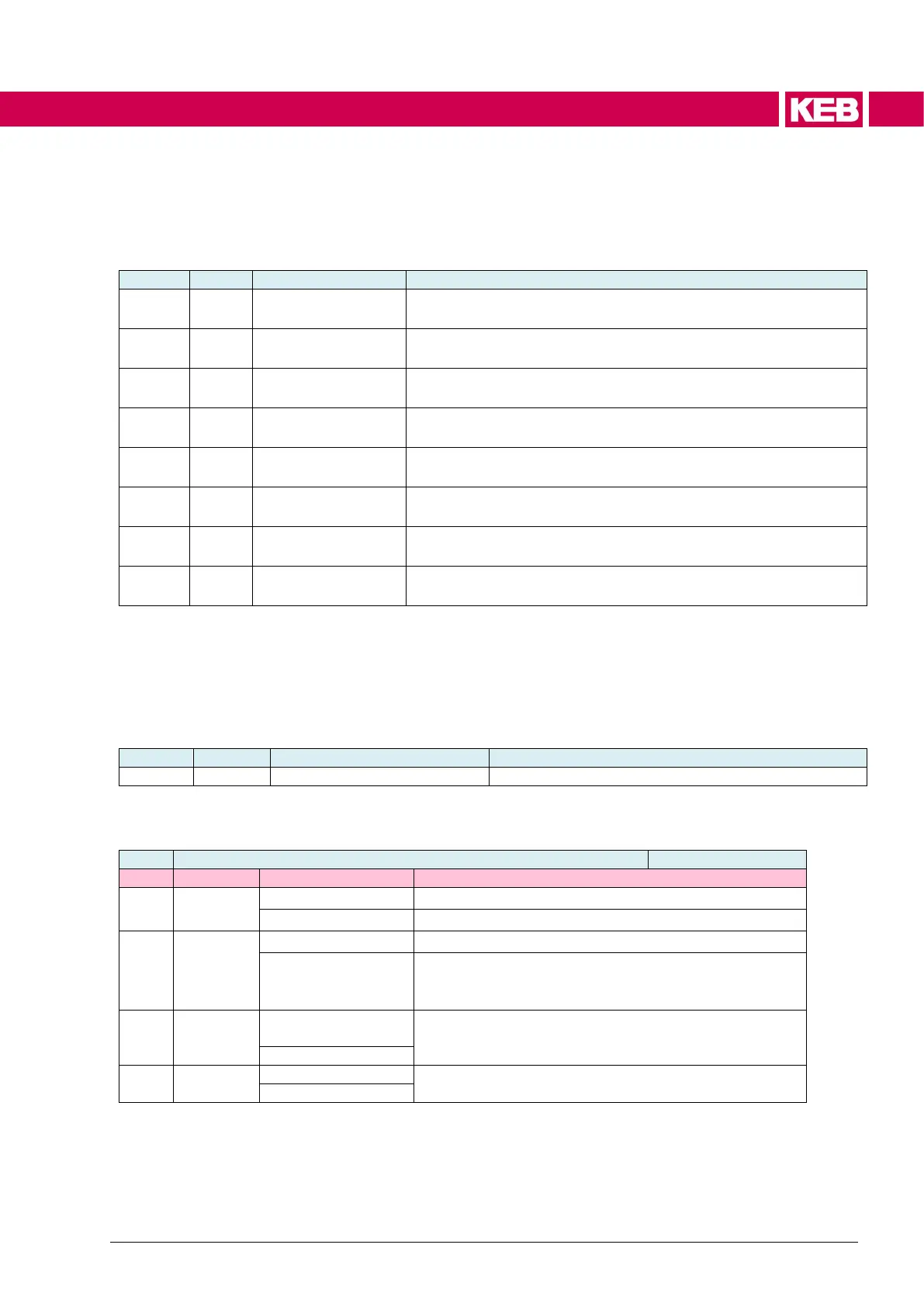
jog for acc jerk ls
[s-3]
Maximum jerk at acceleration in FOR direction of rotation
(low speed)
jog for acc jerk hs
[s-3]
Maximum jerk at acceleration in FOR direction of rotation
(high speed)
jog for dec jerk hs
[s-3]
Maximum jerk at deceleration in FOR direction of rotation
(high speed)
jog for dec jerk ls
[s-3]
Maximum jerk at deceleration in FOR direction of rotation
(low speed)
jog rev acc jerk ls
[s-3]
Maximum jerk at acceleration in REV direction of rotation
(low speed)
jog rev acc jerk hs
[s-3]
Maximum jerk at acceleration in REV direction of rotation
(high speed)
jog rev dec jerk hs
[s-3]
Maximum jerk at deceleration in REV direction of rotation
(high speed)
jog rev dec jerk ls
[s-3]
Maximum jerk at deceleration in REV direction of rotation
(low speed)
4.8.8.2.3 Operating modes of the ramp generator
The behaviour of the ramp generator can be adapted to the requirements of the
application via object cm60 jog ramp mode.
Operational performance of the ramp generator
The bits in cm60 have the following functions:
cm48 is acceleration/deceleration setting for all direc-
tions of rotation (only effective if linear ramps are se-
lected, otherwise cm48-cm51 always apply)
Function => Graphics in co mode
Function => Graphics in co mode

 Loading...
Loading...










