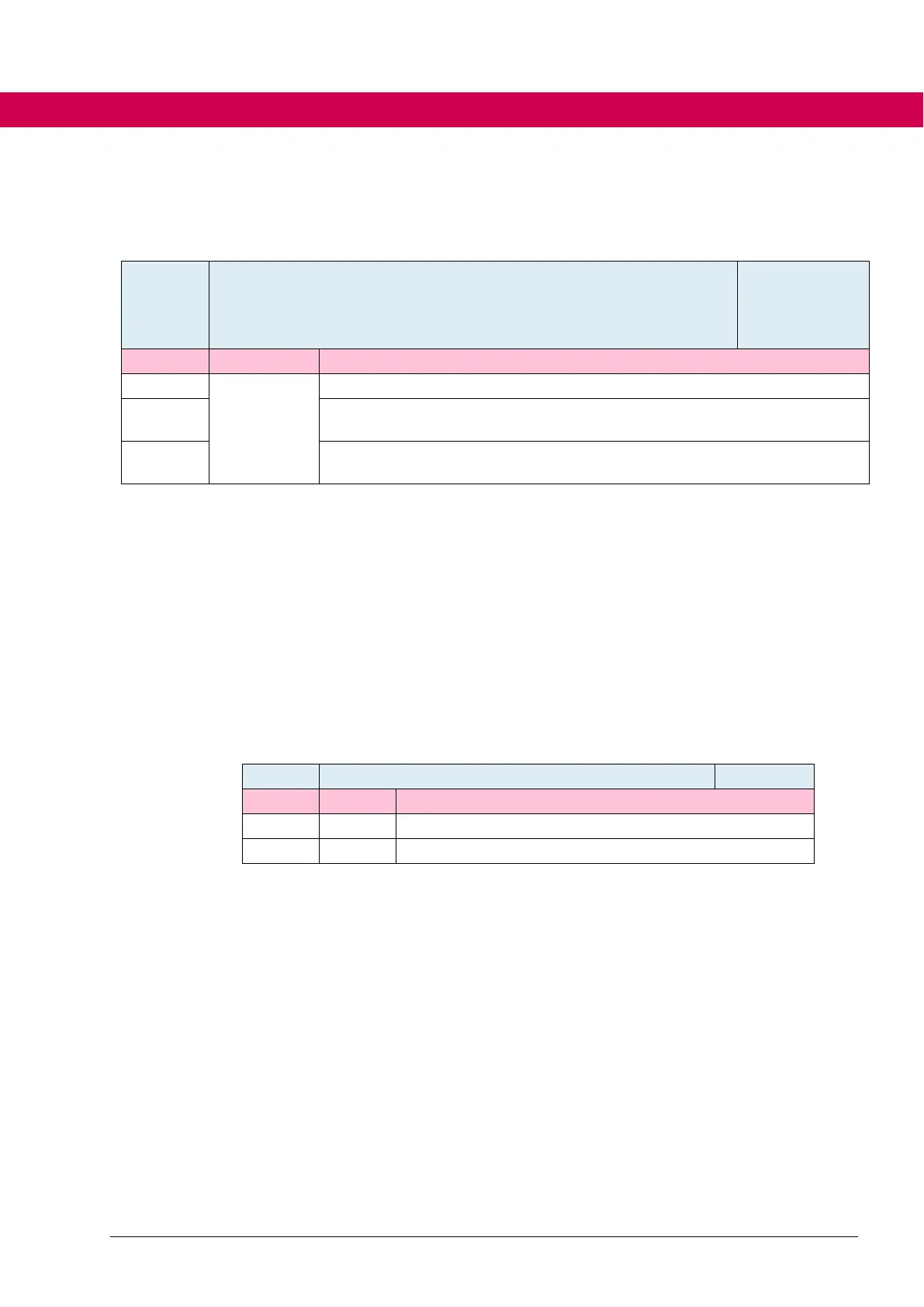
The individual torque offset values for the 16 speed interpolation points can be
read out for the respective switching frequency in parameters mo43...mo46 torque
offset array fswx.
torque offset array fsw0
torque offset array fsw1
torque offset array fsw2
torque offset array fsw3
0x382B [1...16]
0x382C [1...16]
0x382D [1...16]
0x382E [1...16]
Torque offset value for starting speed fsw in Nm
Torque offset value (in Nm) for speed
starting speed fsw + (SubIdx – 1) * speed step fsw
Torque offset value (in Nm) at final speed of the characteristic
starting speed fsw + 15 * speed step fsw
The torque offset value is reduced to zero between zero speed and starting speed
fsw. The offset value is assumed to be constant above the end value of the com-
pensation characteristic (starting speed fsw + 15 * speed step fsw).
The offset table torque offset array and the characteristic values of the offset char-
acteristic torque offset data can not only be identified, but also be described manu-
ally. This means that data that has been determined once for an application can be
transferred to other inverters.
6.2.9.4 Torque correction by identified setpoint
After a compensation characteristic has been identified or externally filled with
data, it must be enabled with mo34 torque offset correction enable by way that the
torque correction is executed.
torque offset corr. enable
the torque offset compensation is deactivated
the torque offset compensation is activated
The compensation value calculated by interpolation for the current speed and cur-
rent switching frequency is displayed in parameter mo33: act. torque offset.
If the offset compensation is deactivated or has not been measured for the current
switching frequency or the active control mode, parameter mo33 displays the value
0 Nm.
The torque offset characteristic is only measured for the positive direction of rota-
tion. An identical offset curve is assumed for the negative direction of rotation.
The offset compensation causes the torque limits apply to the load and not to the
internal motor torque. In the same way, the actual torque display applies to the
torque on the load and not on the motor.Therefore, torque limits are increased by
the identified offset value and actual torques are reduced accordingly.The physical
torque limits (e.g. maximum current of inverter and motor, maximum possible / per-
missible torque of the motor) remain unaffected by the compensation characteris-
tic.

 Loading...
Loading...










