be a resistance measurement (e.g.) in operating temperature or a new measure-
ment of the main inductance after changing the parameter dr08 magnetising cur-
rent.
The measurement of most parameters occurs in standstill. Movement or rotation of
the motor by the test signals is possible.
Only the head inductance (at asynchronous machine) or EMF (at synchronous ma-
chine) must be identified at higher speed. The speed is determined by parameter
dr44.
No automatic brake opening for the ramp-up to dr44
➢ Since no defined torque can be built up during identification, the
brake is not automatically released - regardless of the setting in co21
brake ctrl mode. If necessary, the brake can be opened in brake ctrl
mode „0: controlword“ via the controlword.
➢ Ideally, the identification should be done approximately in no-load op-
eration. If no-load operation is not possible, the identification can also
be executed out with partial load.
➢ The following applies to the safety module type 5 for control
type P: While the motor identification is being carried out, en-
coderless speed detection activated in the safety module can
lead to error trigering of the safety module and switching off the
modulation release. For motor identification, deactivate the en-
coderless speed detection on the safety module.
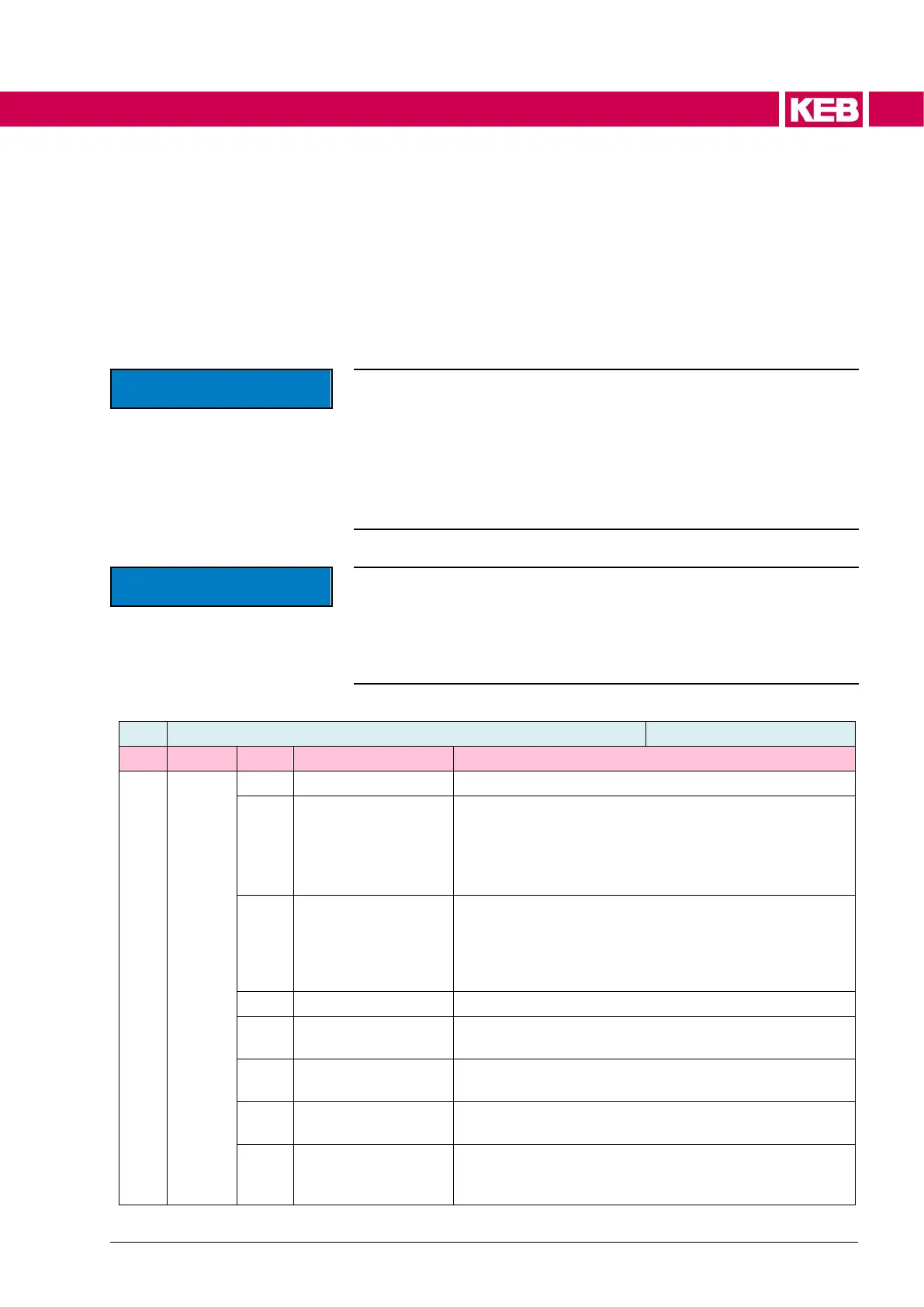
dr54 Bit 0...3 ("mode“) determines which identification shall be executed:
! Attention: requires motor rotation in no-load opera-
tion !
automatic measurement of the dead-time characteristic
and all equivalent circuit data- also the head inductance
or the EMF. The motor accelerates to dr44.
Automatic measurement of the dead-time characteristic
and all equivalent circuit data- with the exception of head
inductance or EMF.
This measurement occurs in standstill, but rotation of the
motor by the test signals is possible.
Measurement of the stator resistance
Measurement of the inductance of a synchronous motor
with the "five-step" procedure
Measurement of dead time characteristic for all available
switching frequencies
ASM rotor resistance
(Rr)
Measurement of the rotor resistance (asynchronous mo-
tor)
ASM sigma ind./SM
ind. (ampl.Mod)
Measurement of the inductance of a synchronous motor
or the leakage inductance of an asynchronous motor with
the "Amplitude-Modulation” procedure

 Loading...
Loading...










