Failures
Chapter 7 - page 2
M-HE.002.1003
7.1.1 Cow is not identified
If a cow enters the box without being identified by the robot, milking is not carried out.
Reasons for non-identification may be:
• No cow data available. A cow carrying an unknown responder generates the
message responder no. unknown. Enter the data of this cow in the X-pert program-
me and position the robot arm in the initial position when milking for the first time.
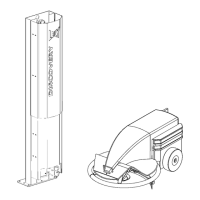
• The cow is not identified if her head is underneath the feed manger. The responder
on the cows neck does not approach the aerial in front of the manger close enough
(figure 7.1). This may occur especially during the training period. Make sure that
there is a small amount of feed in the clean manger stimulating the cow to eat, thus
allowing identification.
7.1.2 Cow does not qualify
In your opinion, the cow is eligible for milking. As she enters the box, she is immediately sent out again. This may
be due to the following reasons:
• The cows status is registered in the T4C
1
/X-pert programme as dry off. The robot is not allowed to milk a dried
off cow. Enter the calved status into the management system.
• The cow does not comply with the acceptance criteria and
is allowed to go thru. Place the cow in a group which is
allowed to be milked at all times and guide the cow into the
robot again.
• The cow left the robot a short while ago and was partly
milked. Because of an incorrect reconstruction of historical
data, the cow may be considered to have been milked.
Verify this by starting a PC communication and checking
the last milking. If the cow was not reported failed, she was
considered successful. Please refer to the previously
mentioned point on getting the cow milked.
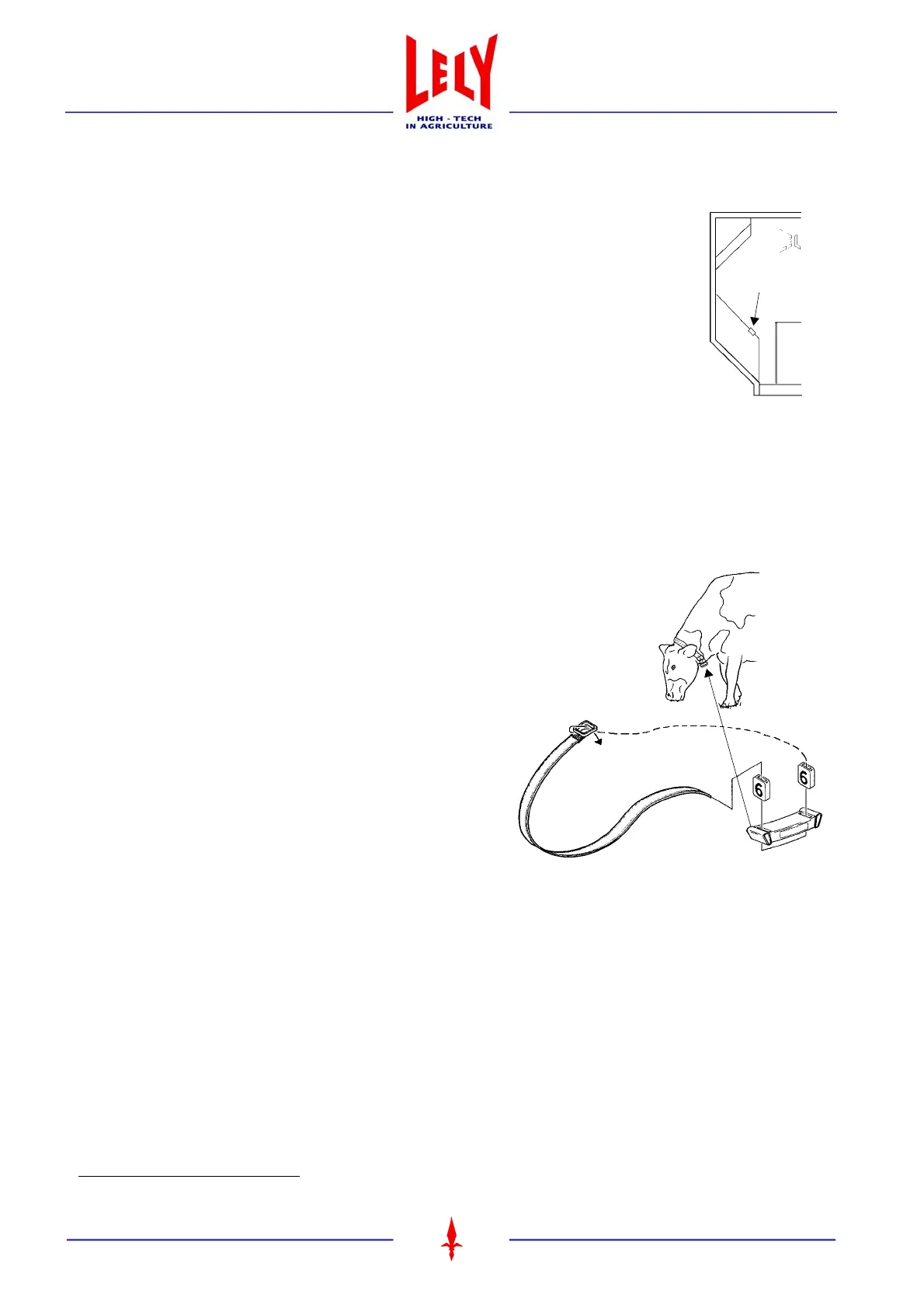
• The cow is not wearing her own respactor/responder. Data
of another cow may create conditions which exclude the
cow from milking. Get the respactor/responder right. You
can find the number on the bottom side of the respactor/
responder (figure 7.2).
7.1.3 Repetition of failed milkings
NOTE
• First make sure that the cow was fully milked
• If the expected milk yield is not met, the milking of the cow in question is considered a failure. After a milking
failure, the cow is allowed right back into the robot box. The milking may fail again, because there is no milk
flow. As soon as the cow is in the box again, this vicious circle can be broken through the robot box control
panel by pressing "Stop" when "Milking" is displayed. Then press "yes" when "Milking interrupted" is
displayed and "yes" once more when "Cow is milked" is displayed.
1) T4C = Time for Cows (where fitted)
Figure 7.1 Aerial in
front of the manger
Figure 7.2 Respactor/responder installation