Chapter 4 - page 3
Operator’s manual ASTRONAUT
M-HE.002.1003
4.3 GENERAL DESCRIPTION OF THE CRS+
The CRS+ controls the functions (figure 4.3) that are
needed to clean the milk delivery line and it synchronizes
the cleaning cycles of several (cluster) robots, provided
that these are connected to one and the same milk
delivery line.
In addition, CRS+ comprises several functions that are
used for emptying the milk tank. Depending upon the milk
tank configuration (see section 4.5.8 ’Emptying the milk
tank’), this makes it possible to put the milking robots out
of operation so that the entire milk delivery line can be
blown empty. Because of these functions, the CRS+ will
generally be installed in the so-called tank area.
Alarms of the ASTRONAUT milking robot(s) are
rendered by the CRS+ through alarm LED’s/display text
as well as being forwarded audibly (buzzer and
telephone call).
As soon as the CRS+ receives a signal from a robot that
it is due for cleaning, this message is forwarded to the
other milking robots (if connected), so that they can also
prepare for cleaning (warming up of water). As soon as
the robots are ready for cleaning, the CRS+ commissions
them to go out of operation. When all milking robots are
out of operation, the intermediate cooler (where fitted) is
blown empty, after which cleaning can be started.
The CRS+ (figure 4.4) communicates with the milking
robots) through the VCPC (Cattle Code Process
Controller).
The CRS+ has a built-in battery to maintain power
supply, also in case of a power failure. In case of a power
failure, it generates an alarm.
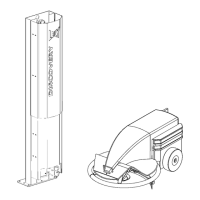
Figure 4.3 Robotic milking system cluster
Figure 4.4 General overview CRS+