Chapter 5 Positioning Instructions
5 - 6
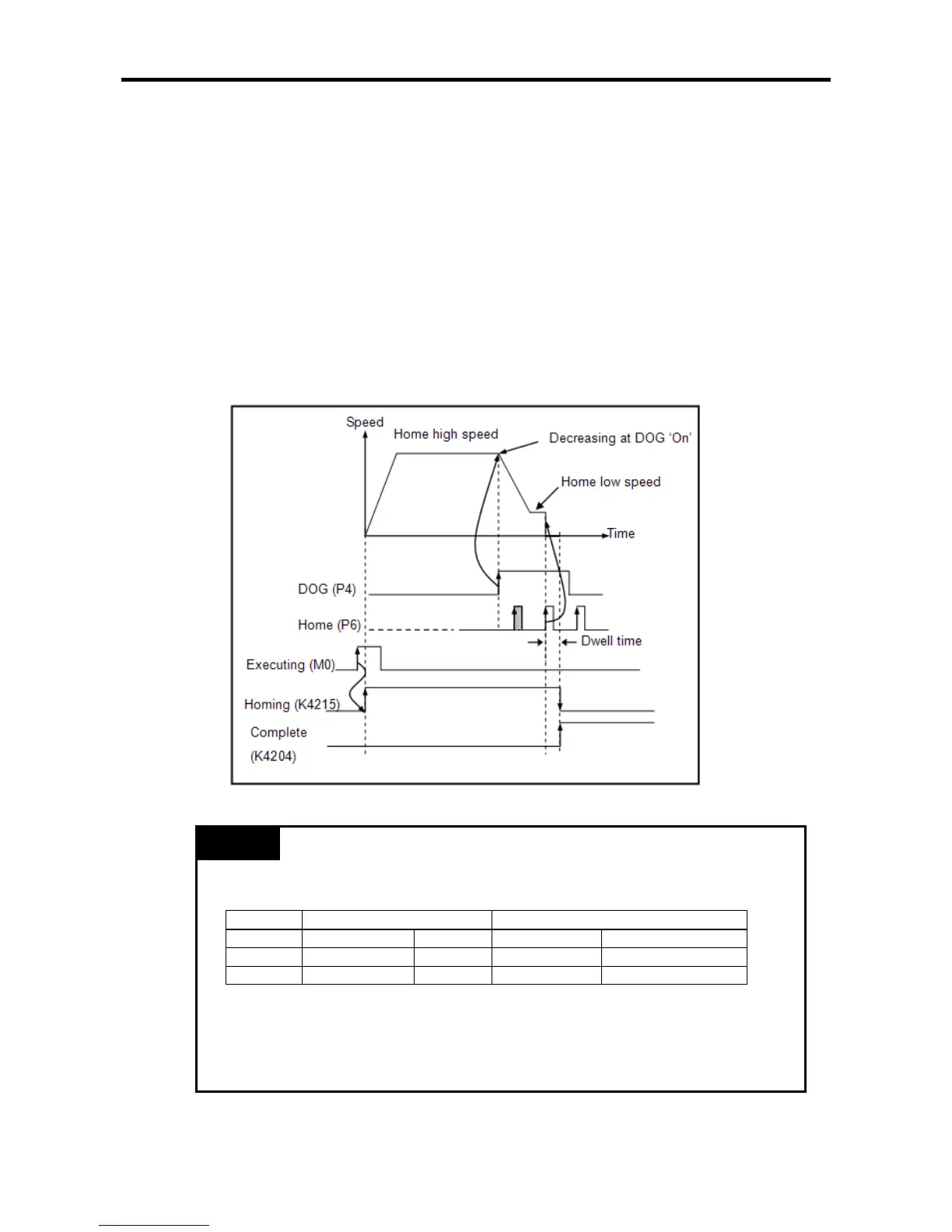
(d) Program Operation
• The ORG instruction is executed when there is the rising edge of M0000 which was used as the
starting signal of the axis X origin return.
(It doesn’t work if axis X is operating or in error)
1) If the origin return instruction (ORG instruction) is executed, it is decelerated in the reverse
direction as set in the origin return parameter and operates at origin return high speed
(50,000pps).
2) If there is the rising edge of the DOG signal during origin return high speed operation, it is
decelerated and operates at origin return low speed (500pps). The deceleration time is 100ms,
set in the parameter.
3) If the origin signal is input, which is the external input signal, after switch to the origin return low
speed, the output immediately stops, and the origin determining status flag (K4204 bit) turns
On after the dwell time (100ms).
(There may be a delay as long as ‘dwell time + 1 scan time’ until the origin determining status
flag (K4204 bit) turns On after the output stops.)
4) Then the current address is preset at 0, which is the origin address set in the parameter.
Remark
• If the contact points of the DOG and the origin input are used together as the external
preset input of the high speed counter, or together as the starting signal of the external
contact point task, the origin detection might be inaccurate.
• The current position address does not change during origin return.