Chapter 3 Before positioning
3- 16
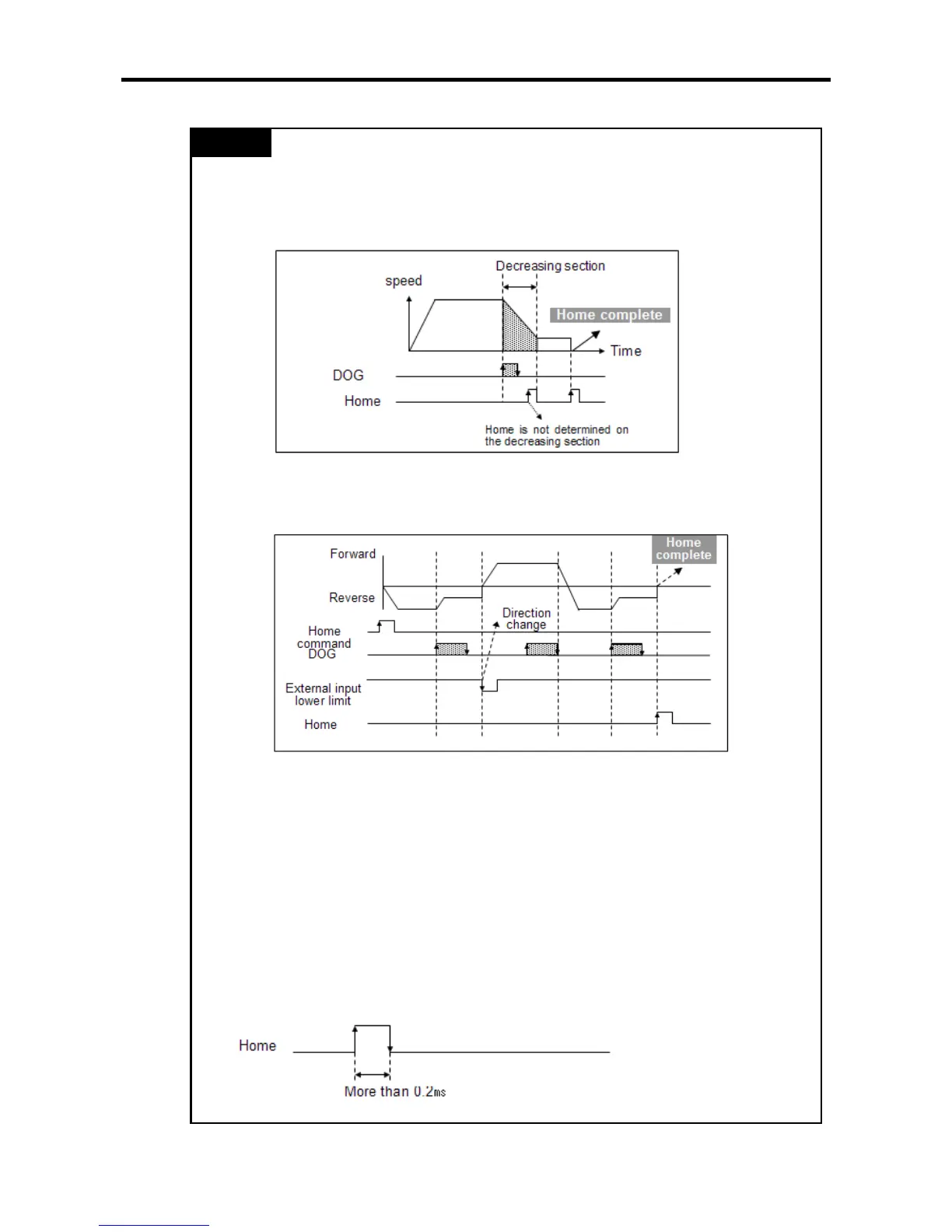
Remark
• In speed-decreasing section, origin is not determined. Though DOG changed from “On” to
“Off” and Origin signal is inputted in speed-decreasing section, origin is not determined.
Origin is determined at first Origin signal after speed-decreasing section
.
• It operates as follows if it meets an external lower limit while waiting for origin entry after
DOG signal changes Off->On->Off. (The following figure is example when home direction
is backward)
(1) If object starts home return backward by homing command and meets rising edge of
DOG, it changes homing with slow speed and if it meets falling edge again , it waits to
determine the origin at the first origin signal.
(2) At this status, if external low limit input signal (B contact point) is entered, target
changes the direction and homing forward with high speed.
(3) At the moment when target meets rising edge of DOG again and falling edge, target
changes the direction to backward and repeats step (1), if origin signal is entered,
origin is determined.
※ During homing, if external input upper or lower limit is entered, object changes direction
promptly without deceleration section. When stepping motor is used, this may cause out of
operation. So be careful.
• If ‘On’ time of origin input signal is very short, XGB may not recognize the input signal. So
‘On’ time of origin should be larger than 0.2ms.