Chapter 3 Before positioning
3- 17
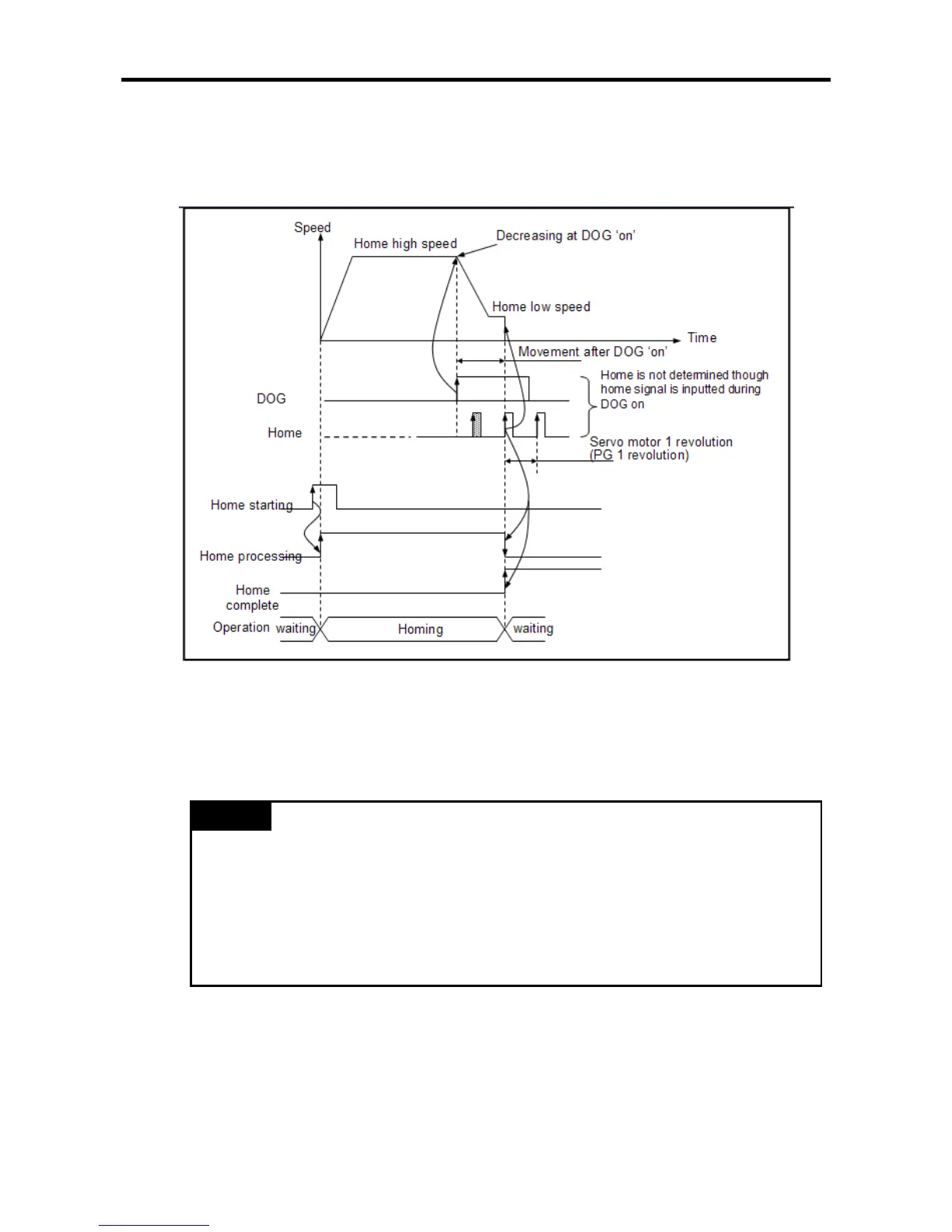
(3) Origin detection after deceleration with DOG set “On”
Operations by home return instruction using DOG and origin signal are as follows.
(a) If homing command(ORG instruction) is executed, it accelerates toward a set home direction
and operates at home high speed.
(b) At the moment, if an external entry, DOG signal is entered, it decelerates and operates at
home return low speed.
(c) Origin is determined and it stops if it meets an external entry, origin signal with DOG set “On”
while it operates at home return low speed.
Remark
•Origin is determined if origin signal is entered with DOG set “On” as long as home return
speed is operating at low speed from high speed via decelerating section with DOG signal set
“On”. That is, when home return speed is decelerating, origin is not determined by origin
signal.
• If it meets external upper/lower limit signal prior to origin after DOG signal is changed from
“Off” to “On”, it works backward direction.