Chapter 3 Before positioning
3- 18
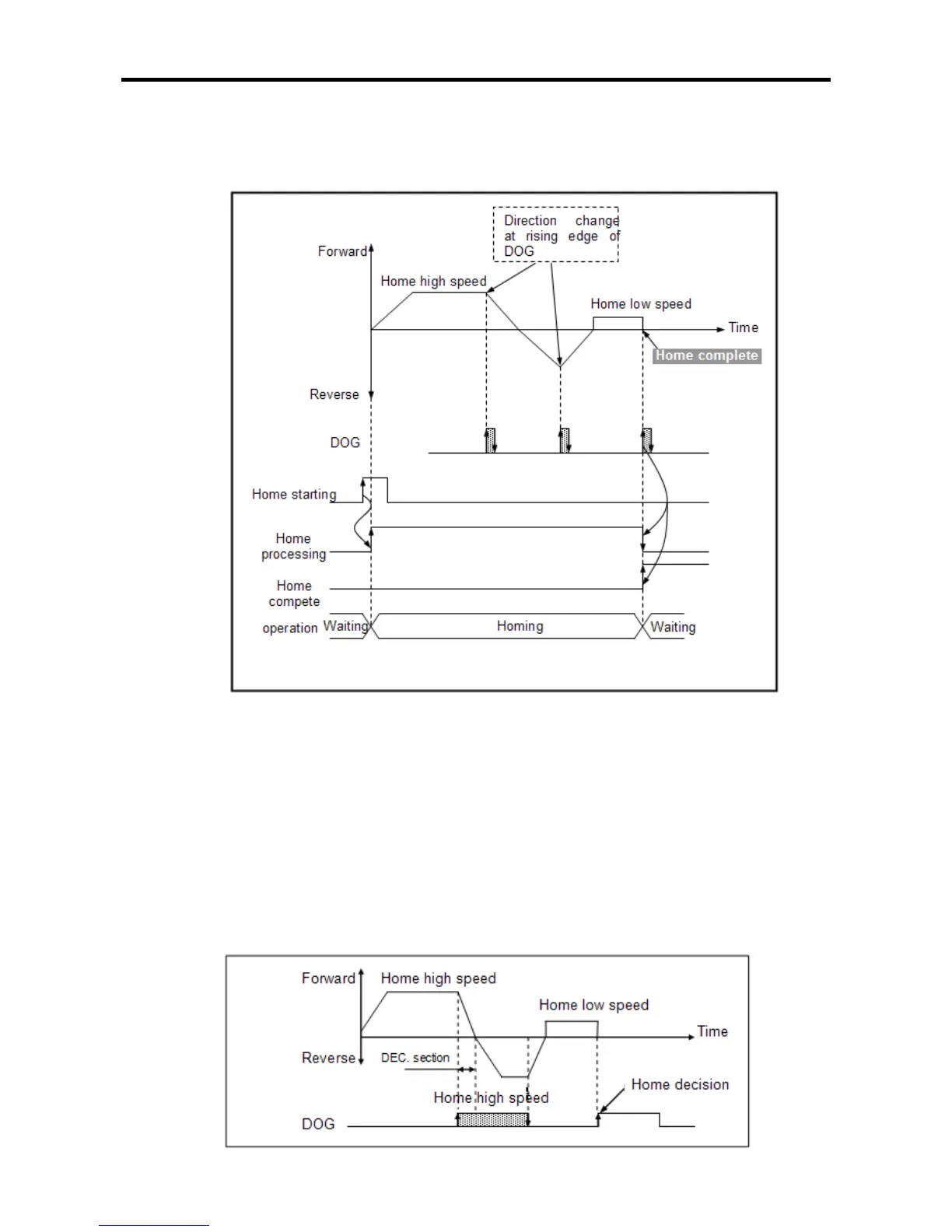
(4) Origin detection by DOG
It is used when determining origin by using the only DOG.
(a) If homing command (ORG instruction) is executed, it accelerates to home direction set in
Home Parameter and it homes with high speed.
(The above figure is example when homing direction is forward)
(b) While target is homing with high speed, if rising edge of DOG occurs, target speed
decreases and change its direction.
(c) When it accelerates after changing direction, if rising edge of DOG occurs, it homes with low
speed.
(d) In the homing status with low speed, rising edge occurs of DOG third time, it stops and
determines the origin.
(e) When ‘On’ time of DOG signal is larger decreasing time, it changes the direction at the falling
edge of DOG and moves with low speed and stops at the rising edge of DOG and
determines the origin.