Chapter 3 Before positioning
3- 34
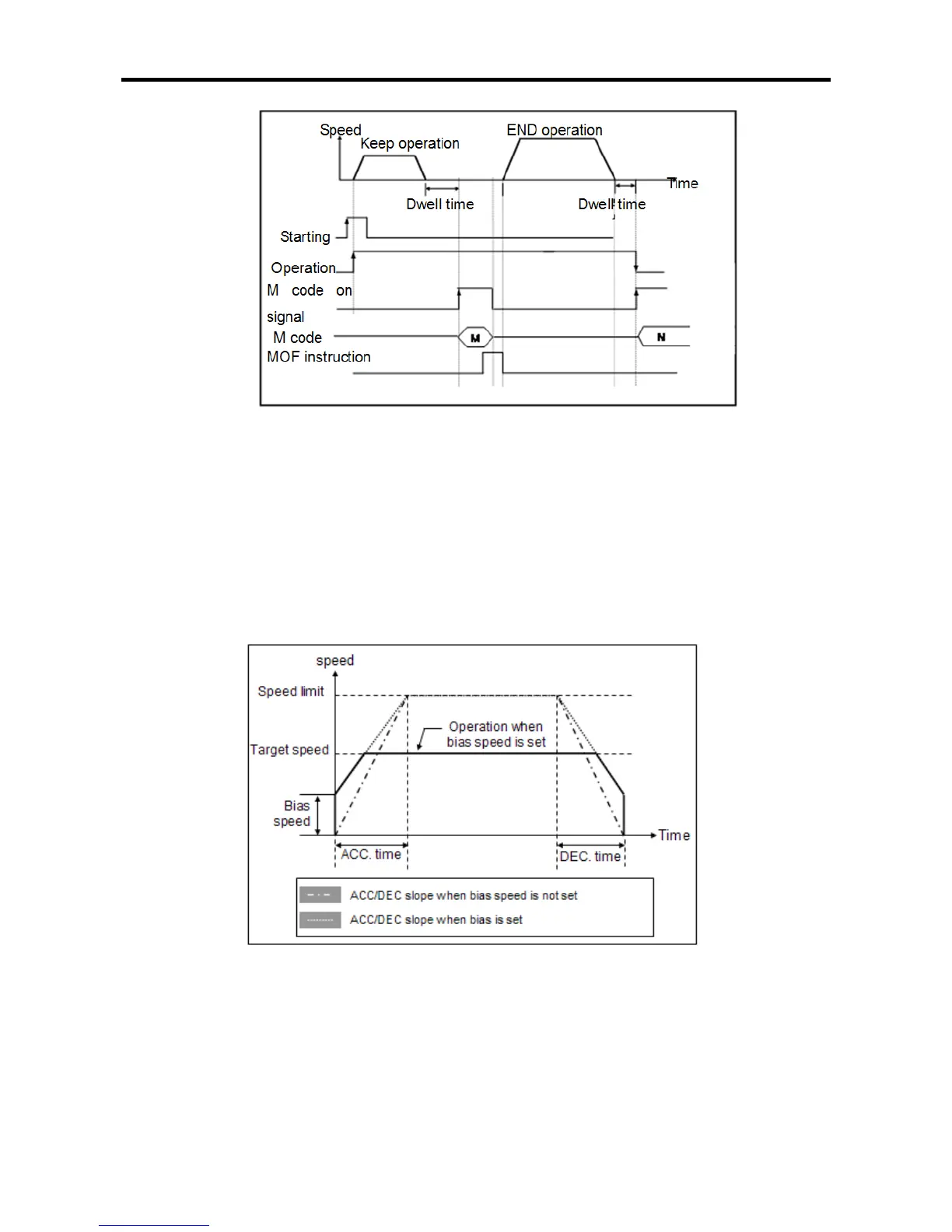
< M code output timing in case of AFTER mode >
(5) Bias speed
• Considering that torque of stepping motor is unstable when its speed is almost equal to 0, the initial
speed is set during early operation in order to facilitate motor’s rotation and is used to save
positioning time. The speed set in the case is called ‘bias speed’.
• In case of XGB built-in positioning, setting range of bias speed is 0 ~ 100,000 (unit:pps).
• Bias speed may be used for
(1) Positioning operation by start instruction (IST,DST,SSTetc.)
(2) Home operation, JOG operation
(3) Main axis of interpolation operation(not available for sub axis)
< Operation when setting bias speed >
• The figure above shows operation when setting bias speed.
The entire operation time may be advantageously reduced if bias speed is highly set, but
excessive value may cause impact sound at the start/end time and unreasonable operation on a
machine.
• Bias speed should be set within the following range.
(a) Bias speed ≤ Positioning speed
(b) Bias speed ≤ Home Return low speed ≤ Home Return high speed