Chapter 3 Before positioning
3- 44
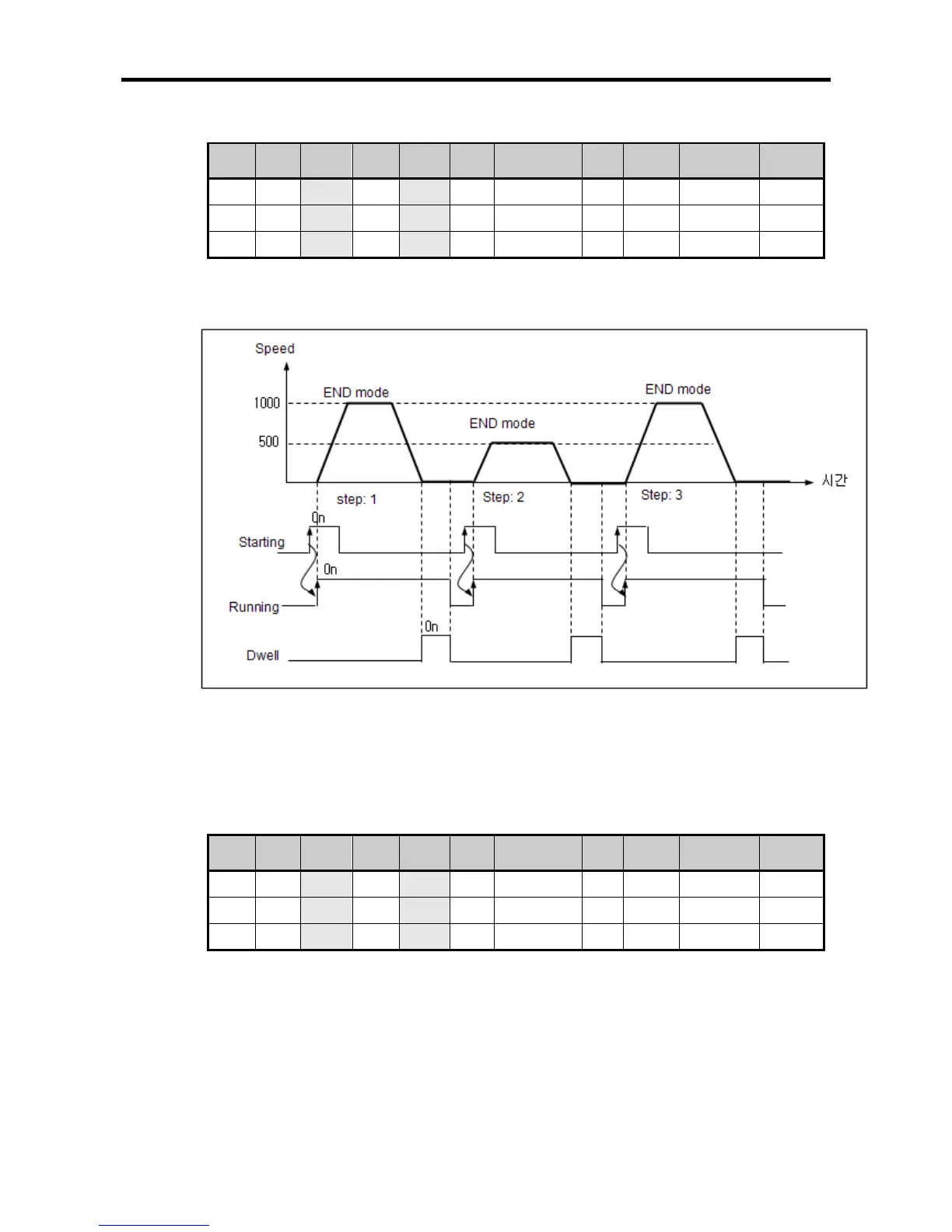
• It assumes that operation data is as follows to describe END/SIN operation.
Step
no.
Coord
.
Pattern
Contr
ol
Metho
d
REP
Step
Address
[Pulse]
M
code
A/D
No.
Speed
[pls/s]
Dwell [㎳]
1 ABS END POS SIN 0 10,000 0 1 1,000 100
2 ABS END POS SIN 0 20,000 0 1 500 100
3 ABS END POS SIN 0 30,000 0 1 1,000 100
• In the above table, operation pattern is set as END, target moves once by once start command
and since Method is set as SIN, the next step becomes ‘current operation step + 1’.
• To operate the next step, one more start command is necessary.
(b) END operation (Repetition)
• In case END operation (repetition), operation of currently started operation is same with END
operation (single).
But, The next step becomes the step set in the REP Step, which is different with END operation
(single).
• It assumes that operation data is set as follows to describe END/Repetition.
Step
No.
Coord
.
Pattern
Contr
ol
Metho
d
REP
Step
Address
[Pulse]
M
code
A/D
No.
Speed
[pls/s]
Dwell [㎳]
1 ABS END POS SIN 0 10,000 0 1 1,000 100
2 ABS END POS REP 1 20,000 0 1 500 100
3 ABS END POS SIN 0 30,000 0 1 1,000 100
1) By first start command, target moves to 10,000 pulse with 1,000pps speed and stops. At this
time, since Method is SIN, the next operation step becomes the no.2 step, current operation
step +1.
2) By second start command, target moves to 20,000 with 500pps and stops. At this time,
Method is REP, the next operation step becomes no.1 step set in REP Step, not no.3 step.
3) If third start command is inputted, target moves to 10,000 ABS coordinates with 1,000 pps.
4) Like this, no.1 step and no.2 step are repeated whenever start command is executed so no.3
step is not operated.