5-17
5-6 Torque Limit
Operating Functions
5
Torque limit during position and speed control
Always select the No. 1 Torque Limit (Pn05E) as the torque limit when using torque control.
For the torque limit when Torque Feed-forward is selected, settings of 1 to 3 are enabled only in
speed control. These settings are disabled if not in speed control.
Settings of 4 to 5 are always disabled.
Note PCL ON: When either Forward Torque Limit (CN1 PCL: pin 7) or MECHATROLINK-II
Communications Option Field (P-CL) is ON.
PCL OFF: When both Forward Torque Limit (CN1 PCL: pin 7) and MECHATROLINK-II
Communications Option Field (P-CL) are OFF.
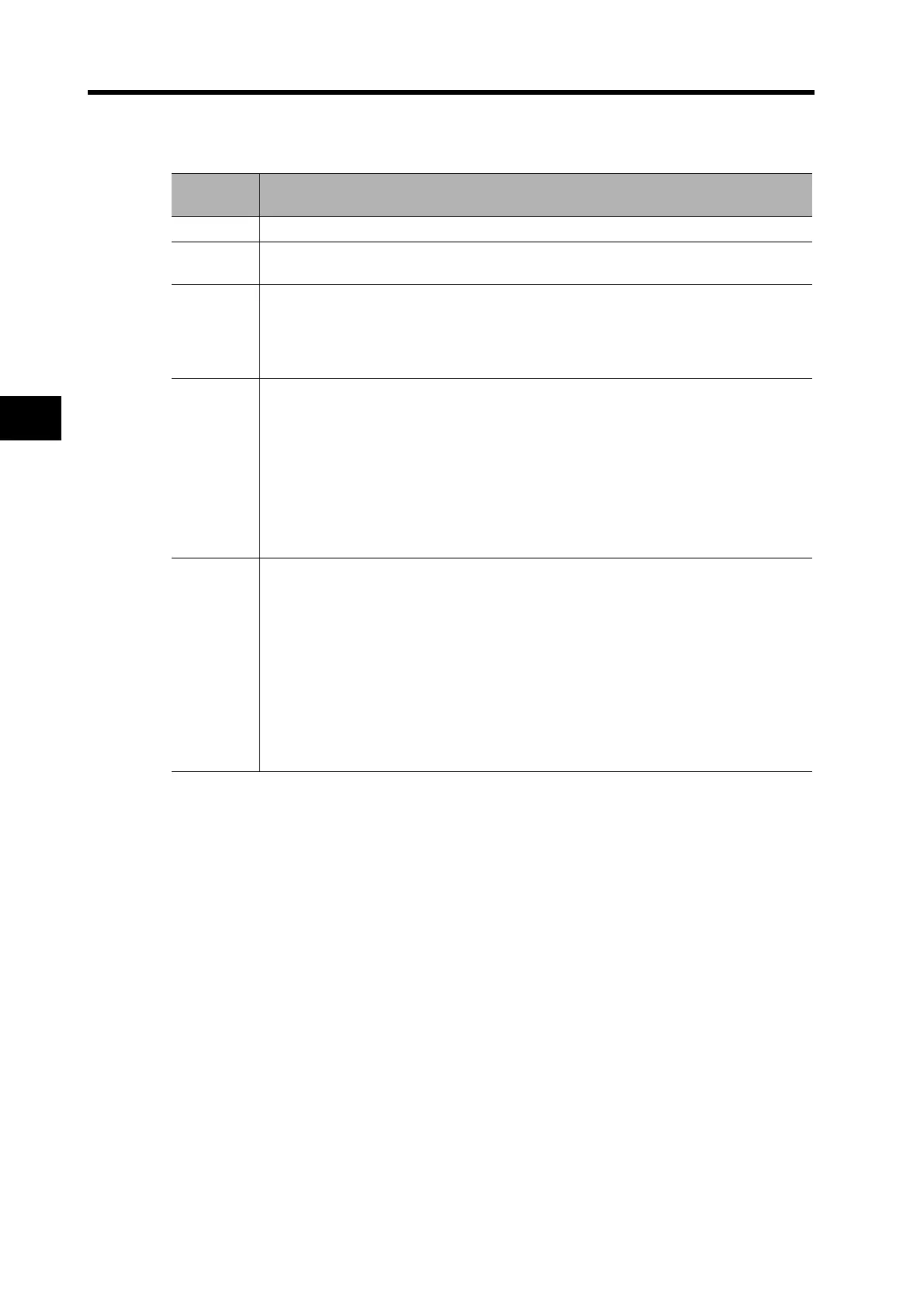
Pn003
Settings
Explanation
1 Set the limit values for forward and reverse operations in Pn05E.
2
Forward: Use Pn05E.
Reverse: Use Pn05F.
3
Switch limits by torque limit values and input signals from the network.
Limit in forward direction:
PCL is OFF = Pn05E, PCL is ON = Pn05F
Limit in reverse direction:
NCL is OFF = Pn05E, NCL is ON = Pn05F
4
Forward: Use Pn05E as limit.
Reverse: Use Pn05F as limit.
Only in speed control, torque limits can be switched by torque limit values from the
network as below.
Limit in forward direction:
Use Pn05E or MECHATROLINK-II command option command value 1, whichever is
smaller.
Limit in reverse direction:
Use Pn05F or MECHATROLINK-II command option command value 2, whichever is
smaller.
5
Forward: Use Pn05E as limit.
Reverse: Use Pn05F as limit.
Only in speed control, torque limits can be switched by torque limit values and input
signals from the network as below.
Limit in forward direction:
PCL is OFF = Pn05E,
PCL is ON = Pn05E or MECHATROLINK-II command option command value 1,
whichever is smaller.
Limit in reverse direction:
NCL is OFF = Pn05F,
NCL is ON = Pn05F or MECHATROLINK-II command option command value 2,
whichever is smaller.

 Loading...
Loading...







