5-27
5-14 Backlash Compensation
Operating Functions
5
5-14 Backlash Compensation
Function
Compensates the position error caused by backlash in the machine.
The specified amount of command units is compensated when the operation direction changes.
Note1. The backlash compensation status will be retained when you switch from position control to
speed control or torque control. Backlash compensation will resume with the status retained
during the previous position control.
Note2. To determine the actual position of the Servomotor, offset the backlash compensation
amount from the Servomotor position data acquired via the network.
Note3. Position data acquired via RS-232 is the value after the backlash compensation.
Note4. After the Servo ON, compensation will be performed on the first position command for
operation in the set direction. Compensation will not be performed for prior reverse
operations.
Compensation will, however, be performed on the first reverse operation after the initial
backlash compensation.
Once backlash compensation has been performed, it will not be performed again as long as
operation continues in the same direction.
Note5. When the Servo OFF status occurs while backlash compensation is performed, the
backlash compensation amount will be cleared by presetting the position command data
within the Servo Drive with Servomotor position data including the backlash compensation
amount. When the Servo ON occurs again, backlash compensation will be performed as
described above.
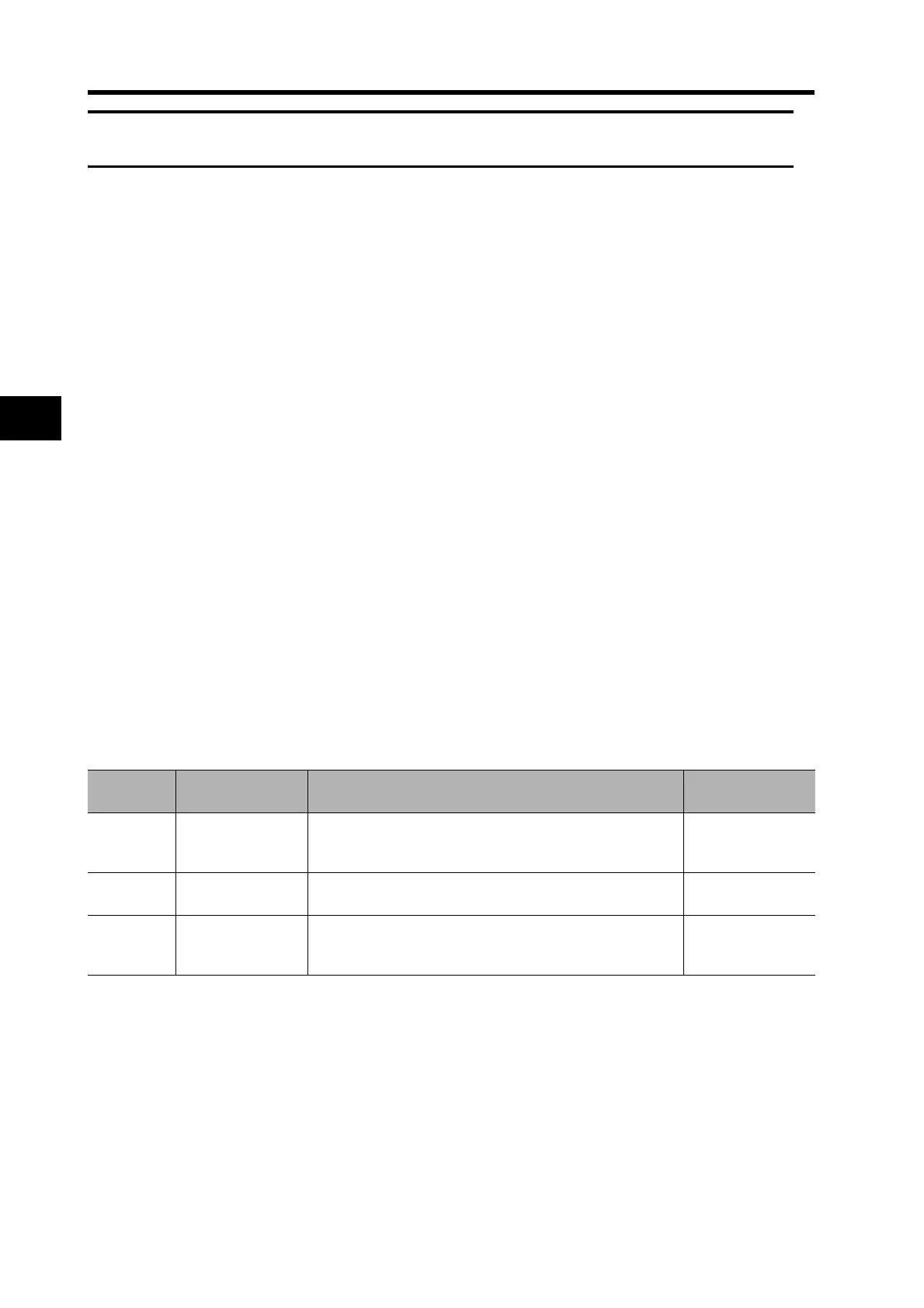
Parameters Requiring Settings
Parameter
No.
Parameter name Explanation Reference page
Pn100
Backlash
Compensation
Selection
Enables or disables backlash compensation and sets the
direction for compensation.
5-81
Pn101
Backlash
Compensation
Sets the backlash compensation amount in command units. 5-81
Pn102
Backlash
Compensation
Time Constant
Sets the time to apply backlash compensation.
The value dividing the compensation amount by the time
constant is the speed.
5-81

 Loading...
Loading...







