5-4
5-2 Speed Control
Operating Functions
5
5-2 Speed Control
Function
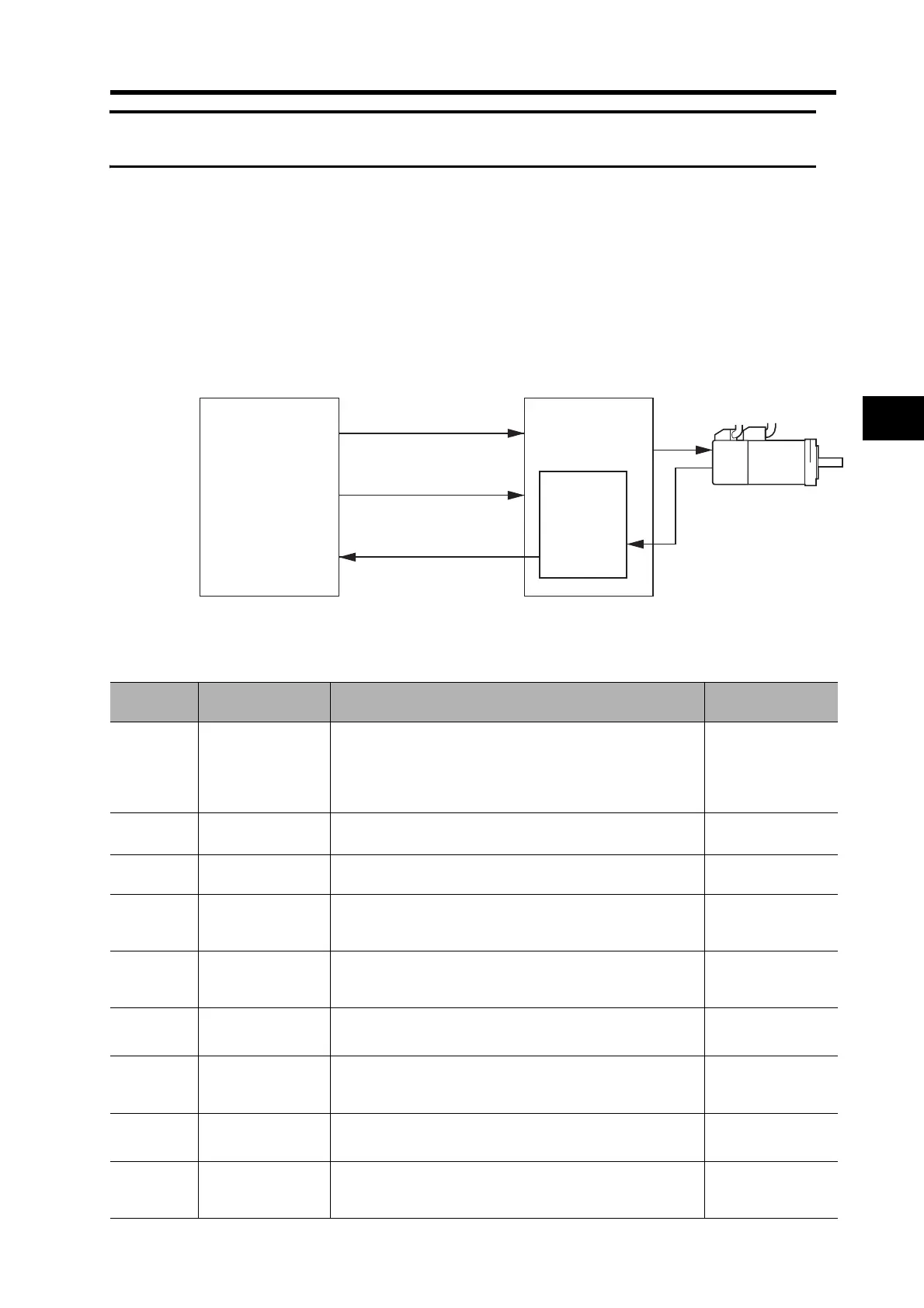
Performs speed control using commands from the Position Control Units for MECHATROLINK-II,
CJ1W-NCF71/CS1W-NCF71. The Servomotor rotates at the command speed.
The current feedback value is divided by the Electronic Gear Ratio (Pn205/Pn206) and expressed
in the commanded units.
Parameters Requiring Settings
Parameter
No.
Parameter name Explanation Reference page
Pn205
Pn206
Electronic Gear
Ratio 1(Numerator)
Electronic Gear
Ratio 2
(Denominator)
Sets the electronic gear ratio (G1/G2).
5-85
5-85
Pn058
Soft Start
Acceleration Time
Sets the time for the Servomotor to accelerate from 0 to
maximum speed [r/min].
5-74
Pn059
Soft Start
Deceleration Time
Sets the time for the Servomotor to decelerate from maxi-
mum speed to 0 r/min.
5-74
Pn061
Speed Conformity
Signal Output
Width
Sets the detection width for the speed conformity output
width (VCMP).
5-75
Pn062
Rotation Speed for
Motor Rotation
Detection
Sets the rotations for the motor rotation detection output
(TGON) signal.
5-75
Pn011
Pn019
Speed Loop Gain
1, 2
Adjusts the speed loop responsiveness.
The larger the value, the faster the response is.
5-67
Pn012
Pn01A
Speed Loop
Integration Time
Constant 1, 2
Sets the speed loop integration time constant.
Adjusts according to the inertia of the load.
5-67
Pn020 Inertia Ratio
Sets the load inertia. The speed loop responsiveness is the
value multiplied by the speed loop gain.
5-68
Pn013
Pn01B
Speed Feedback
Filter Time
Constant 1, 2
Sets the speed feedback time constant.
Normally, use a setting of 0.
5-67
Host Controller
(MECHATROLINK-II Compatible)
Position Control Unit
CJ1W-NCF71
CS1W-NCF71
(Speed Control
Command)
Speed Control
Mode
OMNUC G-Series Servo Drive
Electronic Gear
Ratio
G1: Pn205
G2: Pn206
G1/G2
Feedback
Position/Speed
Issue Target Speed
Specification Command
Issue Torque Feed-
forward Command
OMNUC G-Series
Servomotor

 Loading...
Loading...







