5-75
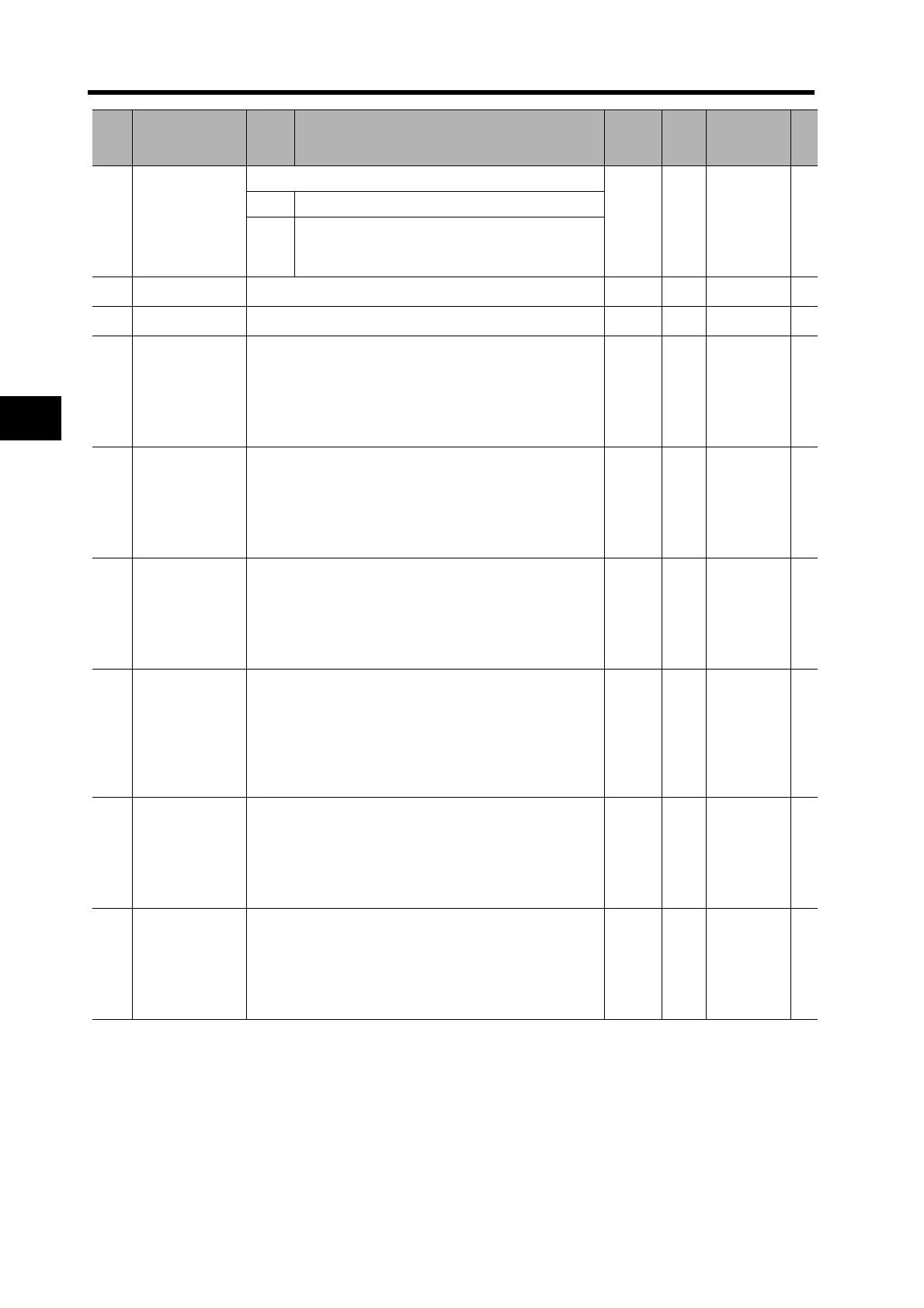
5-26 User Parameters
Operating Functions
5
05B
Speed Limit
Selection
Selects the speed limit for torque control mode.
0 --- 0 to 1 B
0 Use the Speed Limit (Pn053)
1
Use the speed limit value via
MECHATROLINK-II or the Speed Limit (Pn053),
whichever is smaller.
05C
Reserved
Do not change. 0 --- --- ---
05D
Reserved
Do not change. 0 --- --- ---
05E
No. 1 Torque
Limit
Sets the No. 1 Torque Limit for the Servomotor output
torque.
Refer to information on the Torque Limit Selection (Pn003)
to select the torque limit.
The maximum value of the setting range depends on the
applicable Servomotor.
300 % 0 to 500 B
05F
No. 2 Torque
Limit
Sets the No. 2 torque limit for the Servomotor output
torque.
Refer to information on the Torque Limit Selection (Pn003)
to select the torque limit.
The maximum value of the setting range depends on the
applicable Servomotor.
100 % 0 to 500 B
060
Positioning
Completion
Range 1
Sets the positioning completion range when Positioning
Completion 1 (INP1) Output is selected.
Positioning is complete when all positioning command
pulses are exhausted, and the absolute value of the
position deviation converted into command units is less
than this setting.
25
Com-
mand
units
0 to 10000 A
061
Speed Conformity
Signal
Output Width
Sets the detection width for the speed conformity
detection (VCMP) signal.
Speed conformity is achieved when the absolute value of
the difference between the internal speed command
(before acceleration and deceleration limits are applied)
and the Servomotor speed is less than the set speed.
Note This setting has a hysteresis of 10 r/min.
20 r/min 10 to 20000 A
062
Rotation Speed
for Motor Rotation
Detection
Sets the threshold level for the speed reached (TGON)
signal.
Speed reached is determined when the absolute value of
the Servomotor speed is greater than the setting speed.
Note Speed reached detection has a hysteresis of
10 r/min.
50 r/min 10 to 20000 A
063
Positioning
Completion
Range 2
Sets the positioning completion range when Positioning
Completion 2 (INP2) is selected.
Positioning is complete when the absolute value of the
position deviation converted into command units is less
than this setting, regardless of whether position command
pulses are still being processed.
100
Com-
mand
units
0 to 10000 A
Pn
No.
Parameter name Setting Explanation
Default
setting
Unit
Setting
range
Attribute

 Loading...
Loading...







