5-21
5-10 Electronic Gear
Operating Functions
5
5-10 Electronic Gear
Function
The Servomotor rotates at the value (the number of pulses) of the position command multiplied by
the electronic gear ratio.
During speed and torque control, the pulses from the Servomotor encoder are divided by the
electronic gear ratio and converted into command units before being fed back.
Parameters Requiring Settings
The factory default setting for this parameter is Electronic Gear ratio 1 = Electronic Gear ratio 2 = 1.
Setting example (using a 2,500-p/r Incremental Encoder)
To make one turn using a setting unit of 5,000
Setting example (using a 17-bit Absolute Encoder)
To make one turn using a setting unit of 10,000
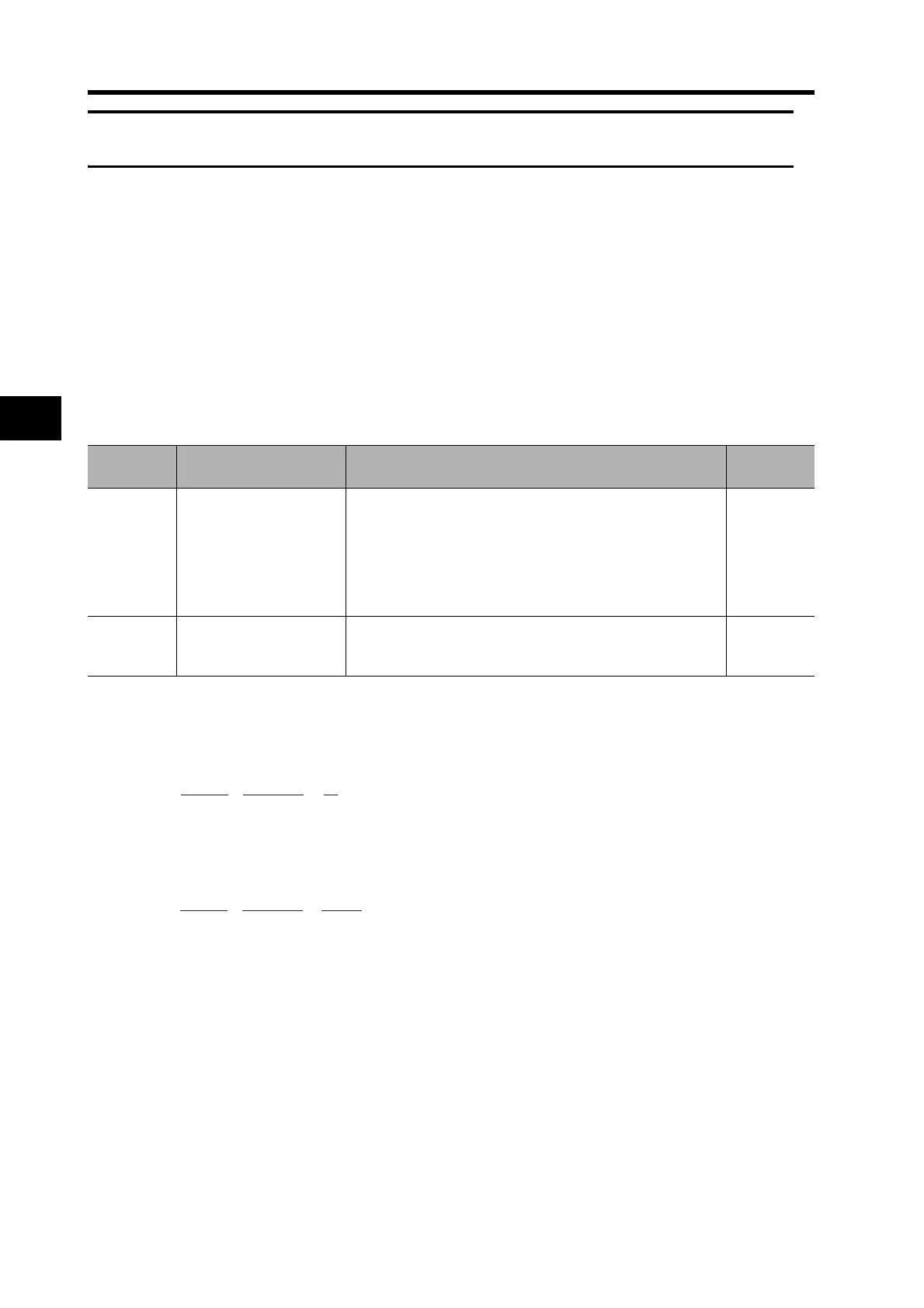
Parameter
No.
Parameter name Explanation
Reference
page
Pn205
Electronic Gear Ratio 1
(Numerator)
Sets the numerator for the electronic gear ratio.
Setting this parameter to 0 automatically sets the encoder
resolution as the numerator. (131,072 for a 17-bit absolute
encoder, and 10,000 for a 2,500-p/r incremental encoder).
The electronic gear ratio can be set to 1/100 to 100 times.
A parameter setting alarm (alarm code 93) will occur if the ra-
tio is set outside this range.
5-85
Pn206
Electronic Gear Ratio 2
(Denominator)
Sets the denominator for the electronic gear ratio.
A parameter setting alarm (alarm code 93) will occur if the ra-
tio is set outside this range.
5-85
=
10000
131072
8192
625
Pn205
Pn206
=

 Loading...
Loading...







