7-3
7-2 Realtime Autotuning
Adjustment Functions
7
7-2 Realtime Autotuning
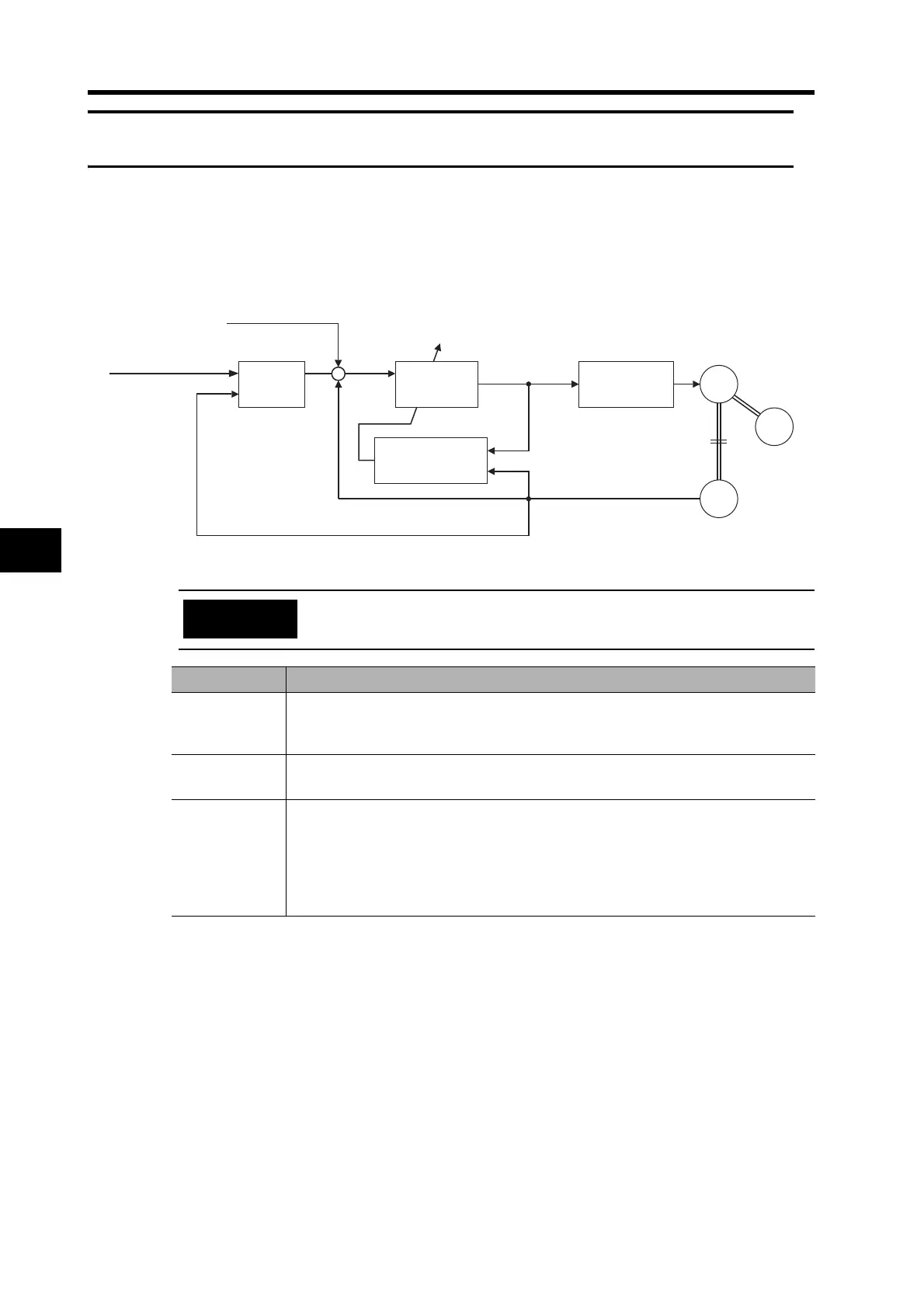
Realtime autotuning estimates the load inertia of the mechanical system in realtime and operates
the system by automatically setting the gain according to the estimated load inertia. By executing
autotuning with the adaptive filter enabled, you can also reduce vibration and resonance.
Realtime autotuning adjusts the PI control for the speed loop, and is thus effective for all controls.
With realtime autotuning, the parameters are fixed to the values in the machine rigidity table when
the machine rigidity is set. The operating coefficients for the speed loop gain and the integration
time constant are changed by estimating the load inertia based on the operating pattern. Set the
estimated values gradually because setting different values for the patterns may cause vibration.
Realtime autotuning may not function properly under the conditions
described in the following table. If realtime autotuning does not function
properly, use normal mode autotuning or manual tuning.
Conditions under which realtime autotuning does not function properly
Load inertia
If the load inertia is too small or too large compared with the rotor inertia (i.e., less
than 3 times, more than 20 times, or more than the applicable load inertia ratio).
If the load inertia changes quickly, i.e., in less than 10 seconds.
Load
If the machine rigidity is extremely low.
If there is backlash or play in the system.
Operating
pattern
If the speed is continuously run at a low speed below 100 r/min.
If the acceleration/deceleration gradually changes at less than 2,000 r/min in 1 s.
If the acceleration/deceleration torque is too small compared with the unbalanced
load and the viscous friction torque.
If a speed of 100 r/min or an acceleration/deceleration of 2,000 r/min/s does not
continue for at least 50 ms.
Estimate
Load Inertia
SM
RE
Load
Position Command
Speed Feedback
Position
Control
Current Loop
Control
Torque
Command
Speed
PI Control
Speed Command
Position Feedback
Precautions
for Correct Use

 Loading...
Loading...







