5-67
5-26 User Parameters
Operating Functions
5
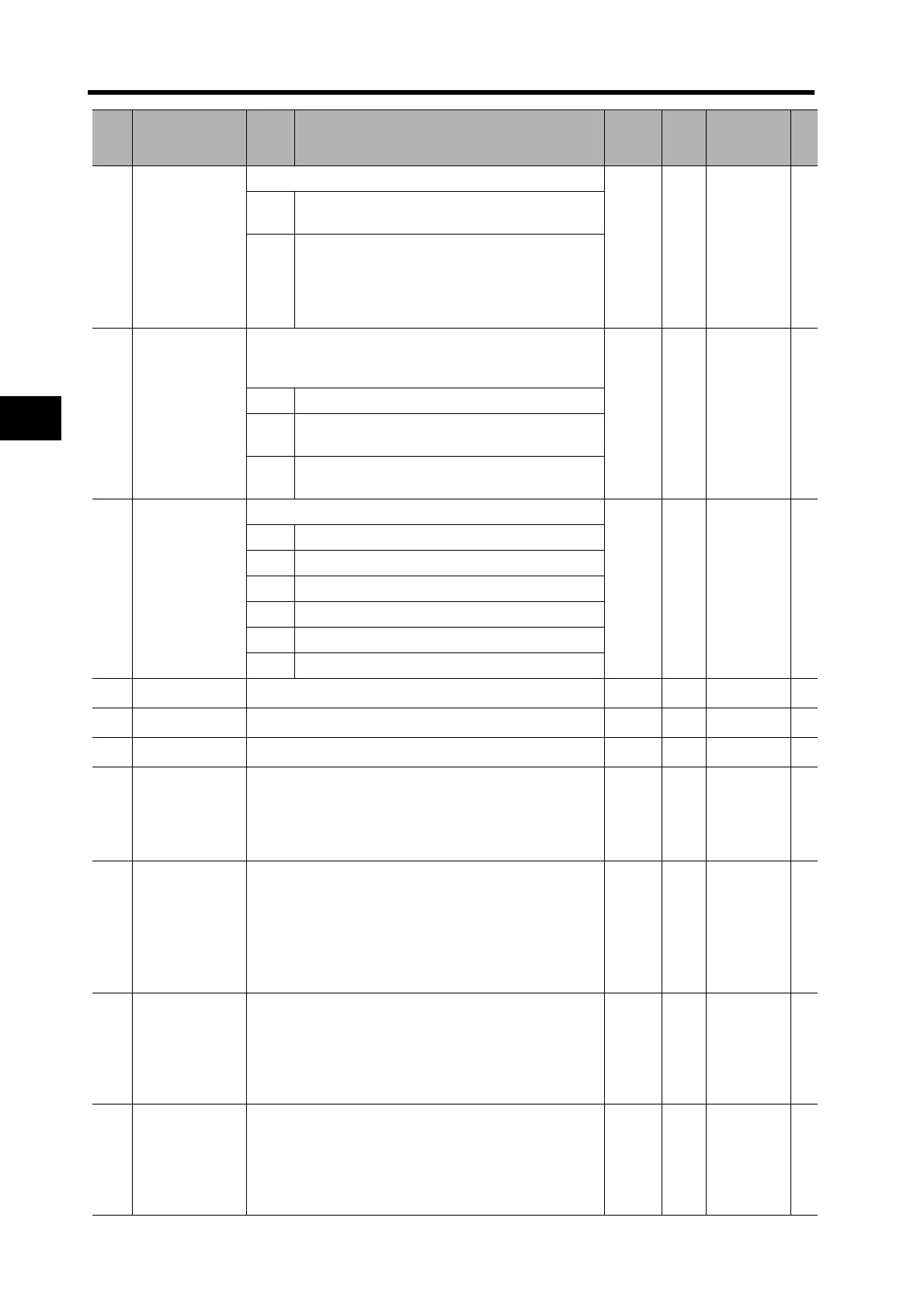
00A
Prohibit
Parameter
Changes via
Network
Allows/prohibits parameter changes via the network.
0 --- 0 to 1 A
0
Allows parameter changes from the host controller
via the network.
1
Prohibits parameter changes from the host
controller via the network.
Attempting to change a parameter via the network
when prohibited triggers the Command Warning
(warning code 95h).
00B
Operation Switch
When Using
Absolute
Encoder
Selects how the an absolute encoder is used.
This parameter is disabled when using an incremental
encoder.
0 --- 0 to 2 C
0 Use as an absolute encoder.
1
Use an absolute encoder as an incremental
encoder.
2
Use as an absolute encoder but ignore absolute
multi-turn counter overflow alarm (alarm code 41).
00C
RS-232 Baud
Rate Setting
Sets the baud rate for RS-232 communications.
2 --- 0 to 5 C
0 2,400 bps
14,800 bps
2 9,600 bps
3 19,200 bps
438,400 bps
5 57,600 bps
00D
Reserved
Do not change. 0 --- --- ---
00E
Reserved
Do not change. 0 --- --- ---
00F
Reserved
Do not change. 0 --- --- ---
010
Position Loop
Gain (RT)
Sets the position loop responsiveness.
Increasing the gain increases position control responsive-
ness and shortens stabilization time.
Oscillation or overshoot will occur if set too high. Adjust for
optimum responsiveness.
400
0.1
[1/s]
0 to 30000 B
011
Speed Loop
Gain (RT)
Sets the speed loop responsiveness.
If the Inertia Ratio (Pn020) is set correctly, this parameter
is set to the Servomotor response frequency.
Increasing the gain increases the speed control respon-
siveness, but too much gain may cause oscillating.
Small gain may cause overshoot in the speed response.
Adjust for optimum responsiveness.
500
0.1
Hz
1 to 30000 B
012
Speed Loop
Integration Time
Constant (RT)
Adjusts the speed loop integration time constant.
Set a large value for large load inertia.
Decrease the setting for fast response with small
inertia.
Set 9999 to stop integration operation while retaining the
integration value. A setting of 10000 disables integration.
200
0.1
ms
1 to 10000 B
013
Speed Feedback
Filter Time
Constant (RT)
Sets the type of speed detection filter time constant.
Normally, use a setting of 0.
Increasing the value reduces the noise of the Servomotor
but also reduces its responsiveness.
This parameter is disabled if the Instantaneous Speed
Observer Setting (Pn027) is enabled.
0 --- 0 to 5 B
Pn
No.
Parameter name Setting Explanation
Default
setting
Unit
Setting
range
Attribute

 Loading...
Loading...







