Remote control commands
R&S
®
NRPxxS(N)
99User Manual 1177.5079.02 ─ 15
MOVing
Outputs intermediate values to facilitate early detection of
changes in the measured quantity. In the settled state, that
means when the number of measurements specified by the
average count has been performed, a moving average is output.
REPeat
Specifies that a measurement result is not output until the entire
measurement has been completed. This means that the number
of measurement cycle repetitions is equal to the set average
count. If the average count is large, the measurement time can
be very long.
The average count is set using [SENSe<Sensor>:]TRACe:
AVERage:COUNt.
*RST:
REPeat
Example:
TRAC:AVER:TCON REP
[SENSe<Sensor>:]TRACe:AVERage[:STATe] <state>
Enables or disables the averaging filter in trace mode.
Parameters:
<state> *RST: ON
[SENSe<Sensor>:]TRACe:DATA?
Returns the measured trace data in a well-defined format.
Unlike FETCh<Sensor>[:SCALar][:POWer][:AVG]?, this command takes the set-
tings of [SENSe<Sensor>:]AUXiliary into account, as explained below.
Command response
Besides the average power, the power sensor can measure additional measurands like
minimum, maximum or random. These additional measurands are denoted as auxiliary
measurands and are selected by [SENSe<Sensor>:]AUXiliary.
A trace measurement can deliver up to 3 measurands. Therefore, the resulting block of
data returned can contain up to 3 blocks of user data.
Basically, the [SENSe<Sensor>:]AUXiliary response represents a "definite length
arbitrary block response data" as defined in IEEE488.2. This object consists of a
header and content.
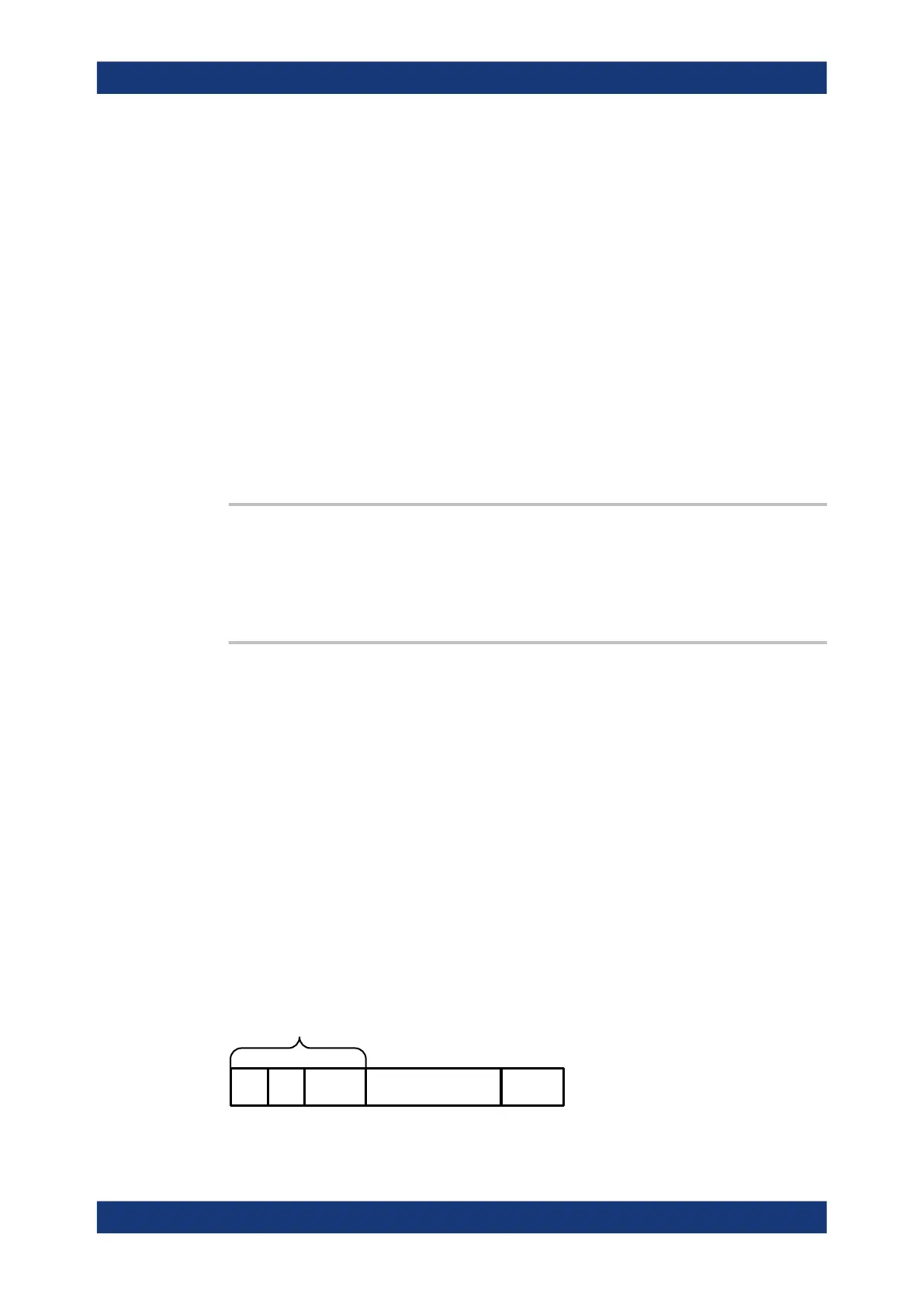
In principle, the response has the format as shown in Figure 9-4:
#
n LLLL user data content <LF>
Header
Figure 9-4: Response format
Configuring the measurement modes

 Loading...
Loading...

