Operat ion CDHD
182 User Manual
When an application requires maximum responsiveness, less integral gain is
required, and KVFR can be set to a higher value. When an application requires
maxim um low-frequency st iffness, KVFR is set to a lower value, which allows
much higher integral gain without inducing overshoot. This will also cause the
system to be slower in responding to the command. A mid-range KVFR value is
usually suitable for motion control applications.
PDFF is a generalized controller. The controller param eters KVP , KVI and KVFR
are tuned by trial and error.
St andard Pole Pla cem ent ( PP) Cont rolle r
Refer t o VarCom
VELCONTROLMODE 2.
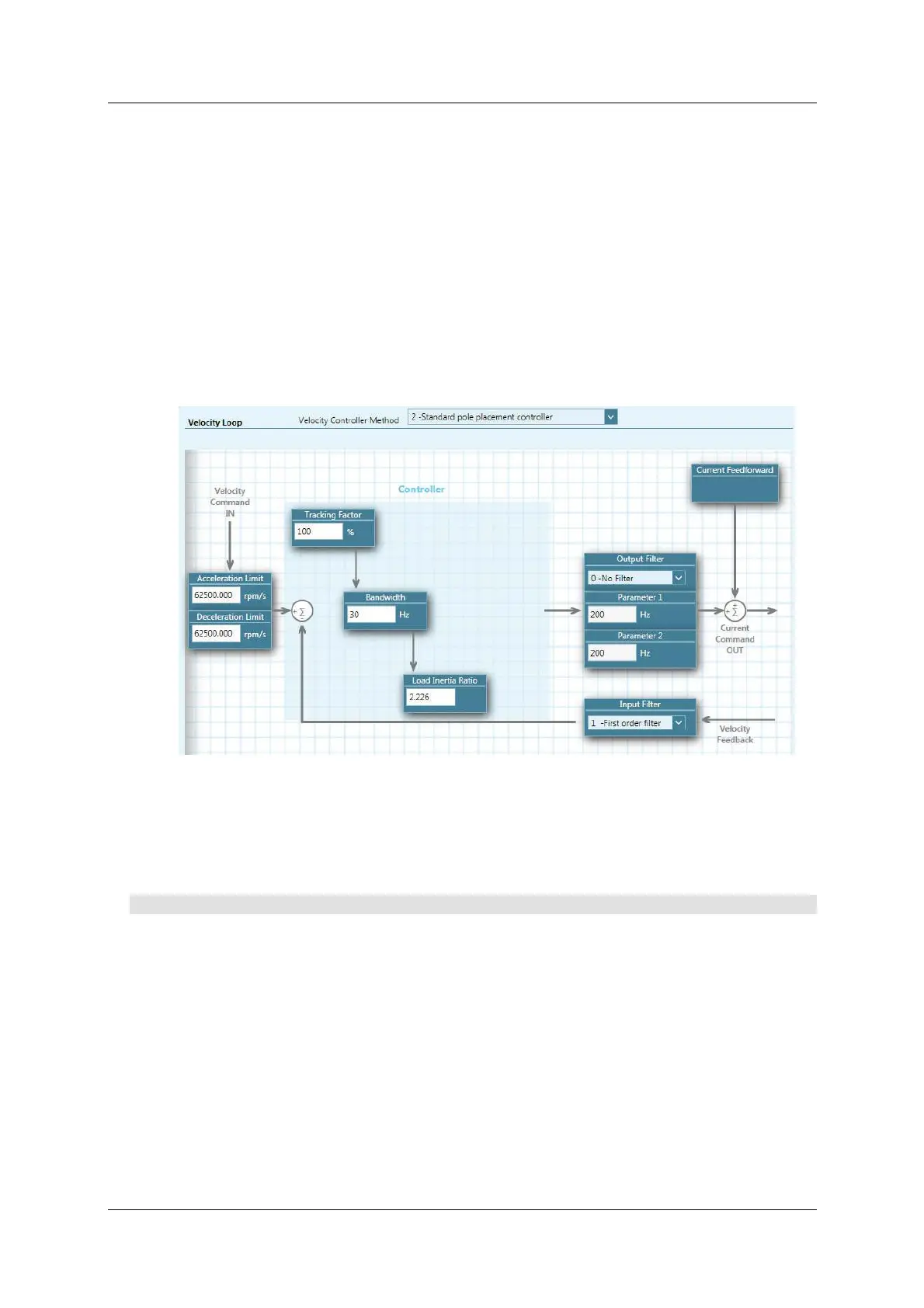
For PP controller tuning, only two param eters are needed: load inertia rat io
(LMJR) and closed-loop system bandwidth (BW).
Figur e 8 - 4 . Ve locit y Cont rol – Standard PP Con t roller
For the controller design, it is not necessary to know the load inertia. The
param eter can be easily tuned, as described in the following procedure.
Use the following procedure to m anually tune t he PP Velocity Cont roller.
Procedu re - Ma nu a l Tun ing of t he PP Ve locit y Cont rolle r
Manual tuning includes the initial steps of load inertia estim ation, and the
subsequent steps to design the optim um controller.
I n ServoStudio, go t o the Ter m inal screen or a Terminal tab, and execute the
steps using standard ASCI I protocol.
Alternately, use the ServoStudio Scope screen to execut e and r ecord m ot ion,
and evaluat e and adjust the param eters.
1 . Set the operation mode to serial velocity: OPMODE 0 .
2 . Set the velocity com pensator to standard pole-placement:
VELCON TROMODE 2 .
3 . Enable the drive: EN .