CDHD Operat ion
User Manual 181
Proportional a nd I nt e gr a l ( PI ) Controller
Refer t o VarCom
VELCONTROLMODE 0.
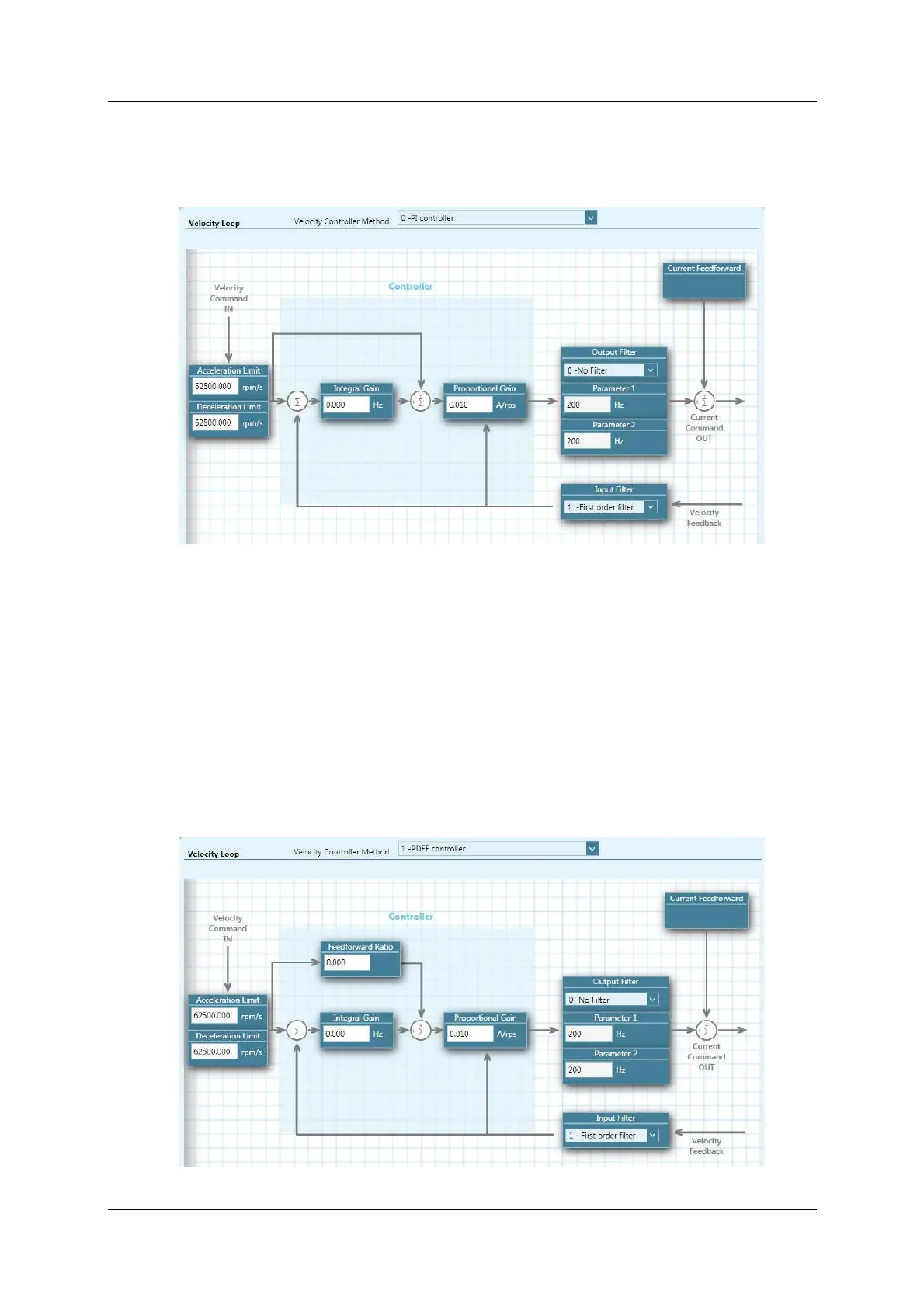
The following figure shows a PI controller.
Figur e 8 - 2 . Ve locit y Cont rol – PI Cont rolle r
The PI controller is a unity feedback system with no pre-filter. The proportional
gain (KVP) stabilizes the system . The integral gain (KVI ) com pensates for the
st eady stat e error.
The controller param eters KVP and KVI and KVFR are tuned by trial and error.
Pse udo Derivat ive Fee dback and Feedforw ar d ( PDFF) Cont rolle r
Refer t o VarCom
VELCONTROLMODE 1.
The following figure shows a PDFF controller. Like the PI cont roller, it has an
integral gain (KVI ) and a proportional gain (KVP), with the addition of a
feedforward, KVFR.
Figur e 8 - 3 . Ve locit y Cont rol – PDFF Controller