Function diagram
87654321
fp_mc_845a_e.vsd
Technology option
MASTERDRIVES MC
01.07.03
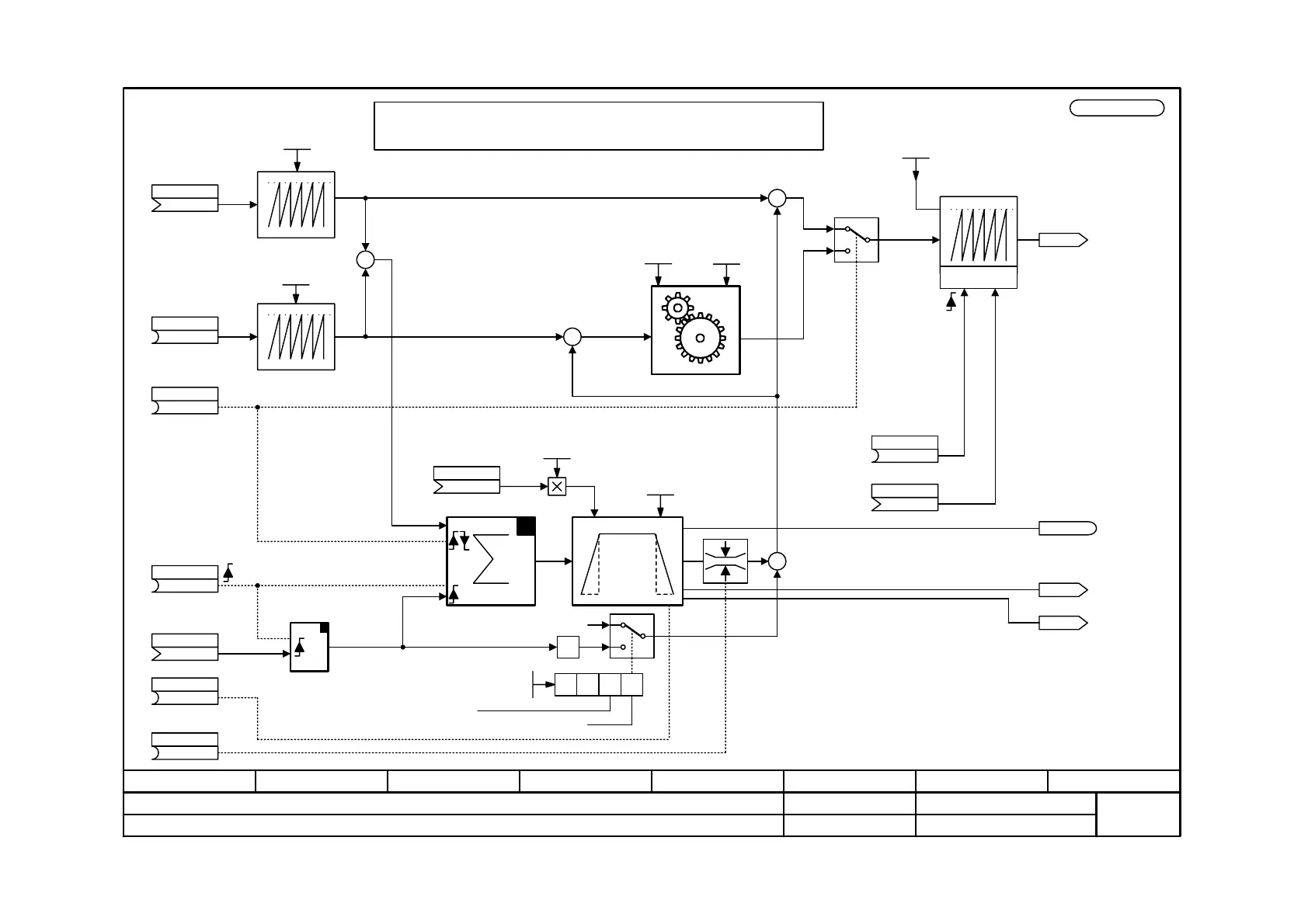
Master setpoint correction compatible mode
- 845a -
V2.5
DVAL
KK
U451.1 (0)
Src Master setpoint correction
Master setpoint 1
Axis cycle length
Master setpoint 1 [LU]
0 … 2
31
-1
U456.1 (4096)
Axis cycle length
Master setpoint 2 [LU]
0 … 2
31
-1
U456.2 (4096)
DVAL
KK
U451.2 (0)
Src Master setpoint correction
Master setpoint 2
–
+
B
U452.2 (0)
Master setpoint source
B
U452.3 (0)
Release
directional reversal
B
U452.5 (1)
Release correction
KK
U453 (826)
Corr. displacement
B
U452.1 (0)
Trigger
ynew=yold+x1+x2
y
x2
x1
-1
A
V-max.
A
+
1
0
0
EZHT
Function selection
U458 (0)
0/1 = master setpoint correction / master setpoint adjustment
0 = without sync.
KK
U454 (1)
Speed
adjustment [%]
V-Max.Corr.
[1000 LU/min]
0.00...20000000.00
U455.2 (600.00)
Acceleration
[1000 LU/s2]
0.00...20000000.00
U455.1 (0.00)
B0830
Master setpoint
correction active
KK0831
Residual path
master setp. corr.
KK0838
Correction [%]
speed
+
Denominator
U457.2 (1)
Numerator
U457.1 (1)
+
0
1
Axis cycle length
Master setpoint output [LU]
0 … 2
31
-1
U456.3 (4096)
U953.50 = __ (20)
KK0830
Master
setpoint
AZL
IVAL
SET VALUE
SET
<1>
Master setpoint correction compatible mode (U458 =
xx0x) (function selection "without synchronizing")
-32768 ... 32767
B
U452.4 (0)
KK
U451.3 (0)
Master setpoint
changeover
<2>
<1> Release directional reversal:
Here, a reversal of the direction of motion is prevented from occurring when
the compensation movement is carried out (specified by master setp. 1/2).
The speed remains at V=0 as long as the incoming master setp. has reached
the path and the ramp is active again.
<2> Denominator = 0 => denominator = 1
 Loading...
Loading...









