Engineering Information 06.2005
6SE7087-6QX70 (Version AE) Siemens AG
11-12 Compendium Motion Control SIMOVERT MASTERDRIVES
11.4 Selection of the motor
♦ The motor is selected according to the following criteria:
♦ Adherence to the dynamic limits, i.e. all M,n points of the load cycle
must be below the limit curve.
♦ The motor speed must be smaller than n
max perm
. With
synchronous servomotors, the maximum motor speed should not be
greater than the rated speed. With induction servomotors, the
maximum motor speed must not be more than 1.2 times the rated
speed in the field weakening area.
♦ Adherence to the thermal limits, i.e. with synchronous servomotors,
the motor rms torque at the mean motor speed resulting from the
load cycle must be below the S1 curve. With induction servomotors,
the rms value of the motor current within a load cycle must be
smaller than the rated current of the motor.
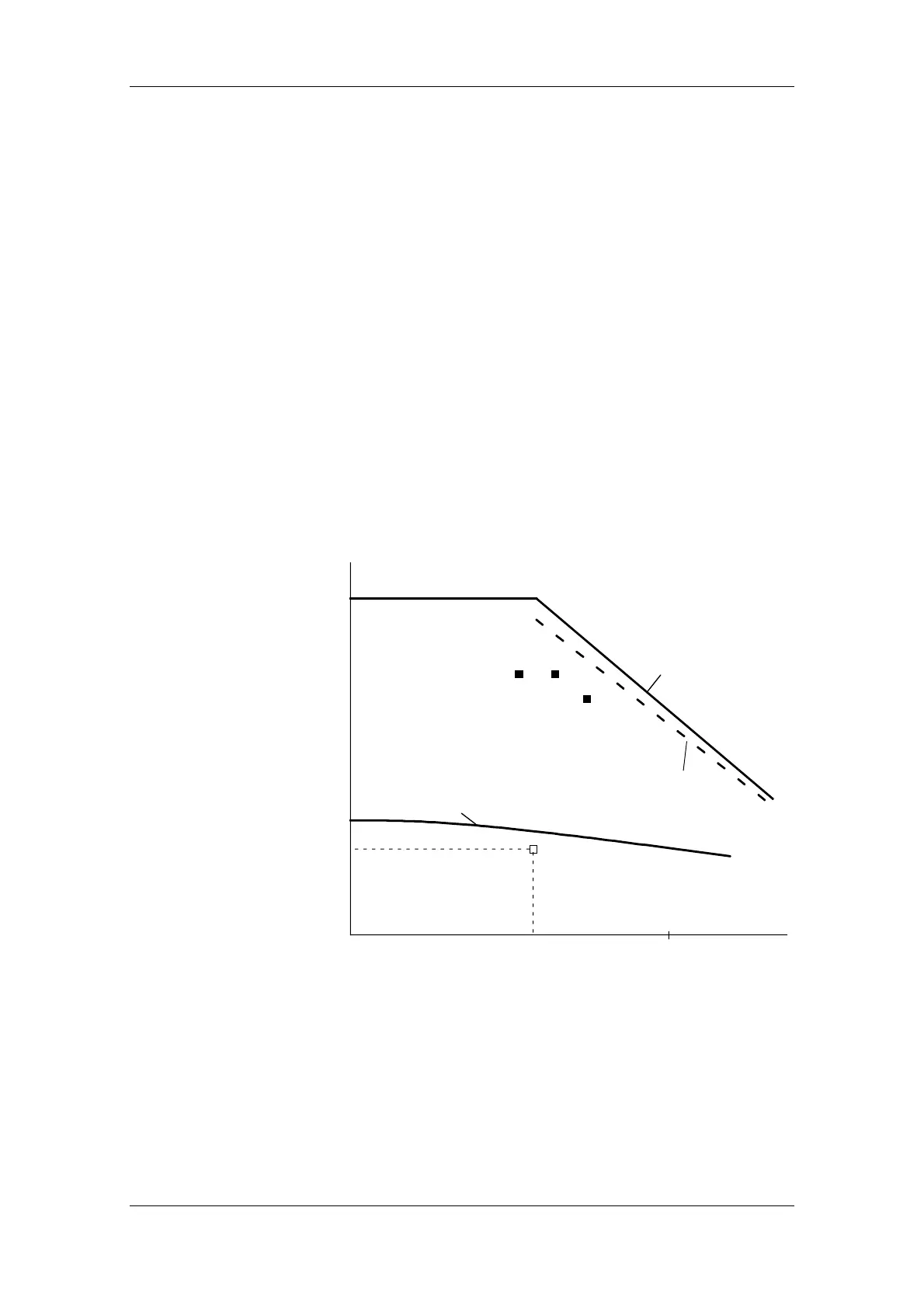
When synchronous servomotors are used, it must be borne in mind that
the maximum permissible motor torque at high speeds is reduced by
the voltage-limit curve. In addition, a distance of about 10 % should be
kept to from the voltage-limit curve as a protection against voltage
fluctuations.
S1 curve
n
mean
max perm.
M
n
Mot
M
Mot
Voltage-limit curve
10% distance
Points of load cycle
n
n
eff
M
Fig. 11-7 Limit curves for 1FK6/1FT6 motors (synchronous servomotors)
 Loading...
Loading...









