06.2005 Engineering Information
Siemens AG 6SE7087-6QX70 (Version AE)
SIMOVERT MASTERDRIVES Compendium Motion Control 11-13
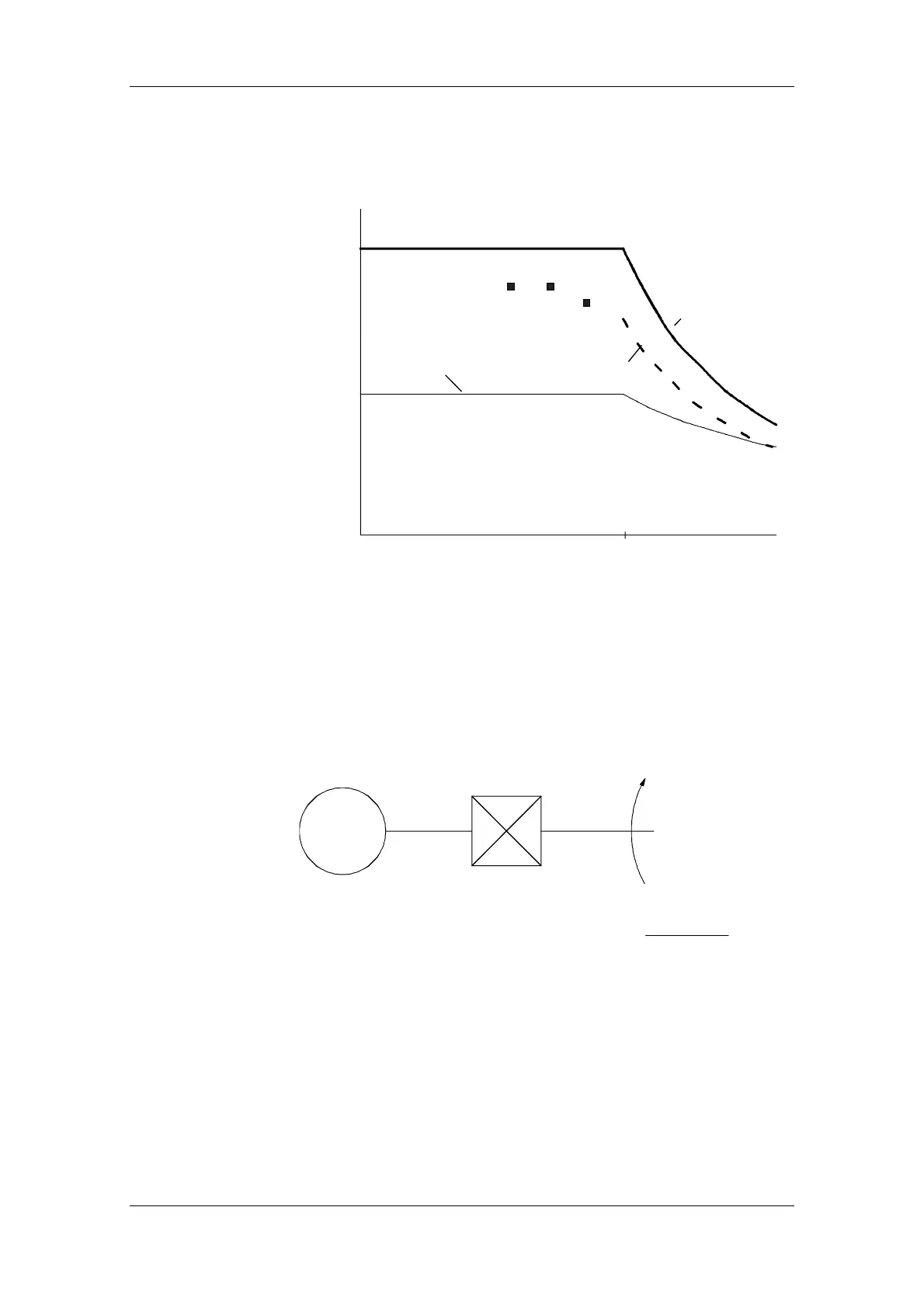
If induction servomotors are used, the permissible motor torque in the
field-weakening range is reduced by the stalling limit. Here, a distance
of approximately 30 % should be kept to.
Stalling limit
S1 curve
M
Mot
max perm.
M
Mot
n
30% distance
M
n
n
n
Points of load cycle
Fig. 11-8 Limit curves for 1PA6 motors (induction servomotors)
In order to keep a check on the dynamic limits, the relevant points of
the torque curve must be calculated. In general, the motor torque at
maximum speed during the acceleration phase is decisive. The motor
torque and motor speed are calculated as follows when load torque,
speed under load and angular acceleration/deceleration on the gear-
output side are known:
Motor
Transmission ratio i
J
G
η
G
,
M
n
load
load
J
Mot
α
b,v load
MJi Ji M
i
Mot Mot b v load
G
b v load load
G
Sign M
load
=⋅⋅ +⋅⋅ + ⋅
⋅
αα
η
,
*
,
()
1
nin
Mot load
=⋅
J
Mot
Motor inertia
J
G
*
Gear moment of inertia referred to motor speed
G
Gear efficiency
 Loading...
Loading...









