08.2012 Parameterizing Steps
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 6-21
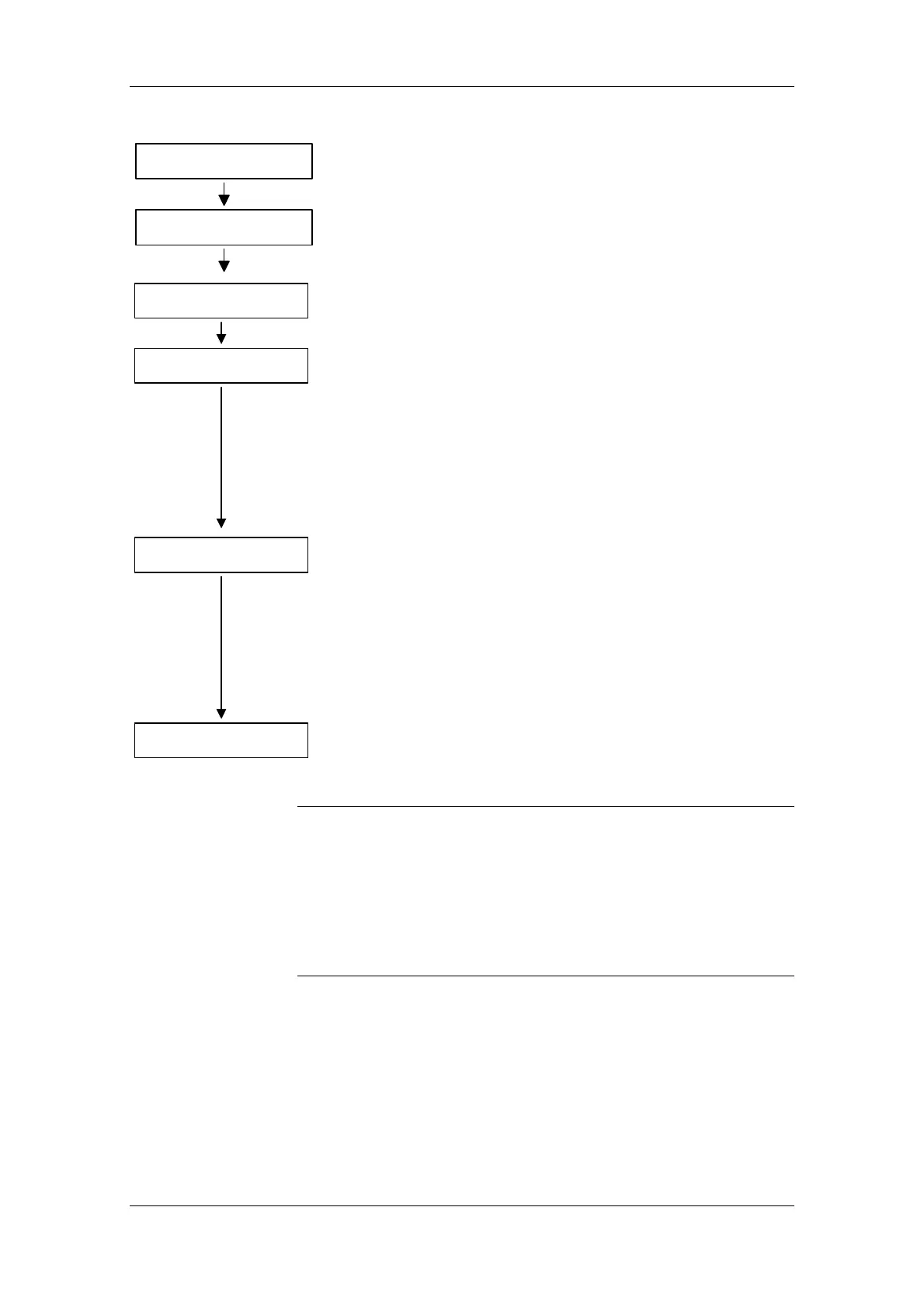
P352 = ?
Input the reference value for all frequency variables
(normalization variable for frequency limitations and frequency
setpoints and frequency actual values).
P353 = ?
Input the reference value for all speed variables
(normalization variable for speed limitations and speed setpoints
and speed actual values).
P354 = ?
Input the reference value for all torque variables
(normalization variable for torque limitations and torque
setpoints and torque actual values).
P452.1...4 = ?
Input the maximum speed in positive direction of rotation in %
(referred to P353).
If asynchronous motors are used (P095 = 2 or 4), only operation
up to twice the motor corner frequency (2 x P293) is permissible
in field weakening.
From version V2.30:
It is generally recommended when operating asynchronous
motors in field weakening to select a controller structure
optimized for this purpose (P296=3). This enables operation up
to 5 times the field weakening.
P453.1...4 = ?
P060 = 1
Return to the parameter menu
Input the maximum speed in negative direction of rotation in %
(referred to P353).
If asynchronous motors are used (P095 = 2 or 4), only operation
up to twice the motor corner frequency (2 x P293) is permissible
in field weakening.
From version V2.30:
It is generally recommended when operating asynchronous
motors in field weakening to select a controller structure
optimized for this purpose (P296=3). This enables operation up
to 5 times the field weakening.
When leaving the "Drive setting" menu, the entered parameter values
are checked for plausibility. Parameter settings that are not plausible
will lead to a fault. The wrongly set parameters are entered in
parameter r949 (fault value).
If current control is selected as the motor control, a suitable sensor
board (SBx) must be inserted beforehand and a permissible motor
encoder selected. If this is not carried out, the unit will also generate a
fault when it tries to leave the "Drive setting" menu.
NOTE
 Loading...
Loading...









