08.2012 Parameterizing Steps
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 6-33
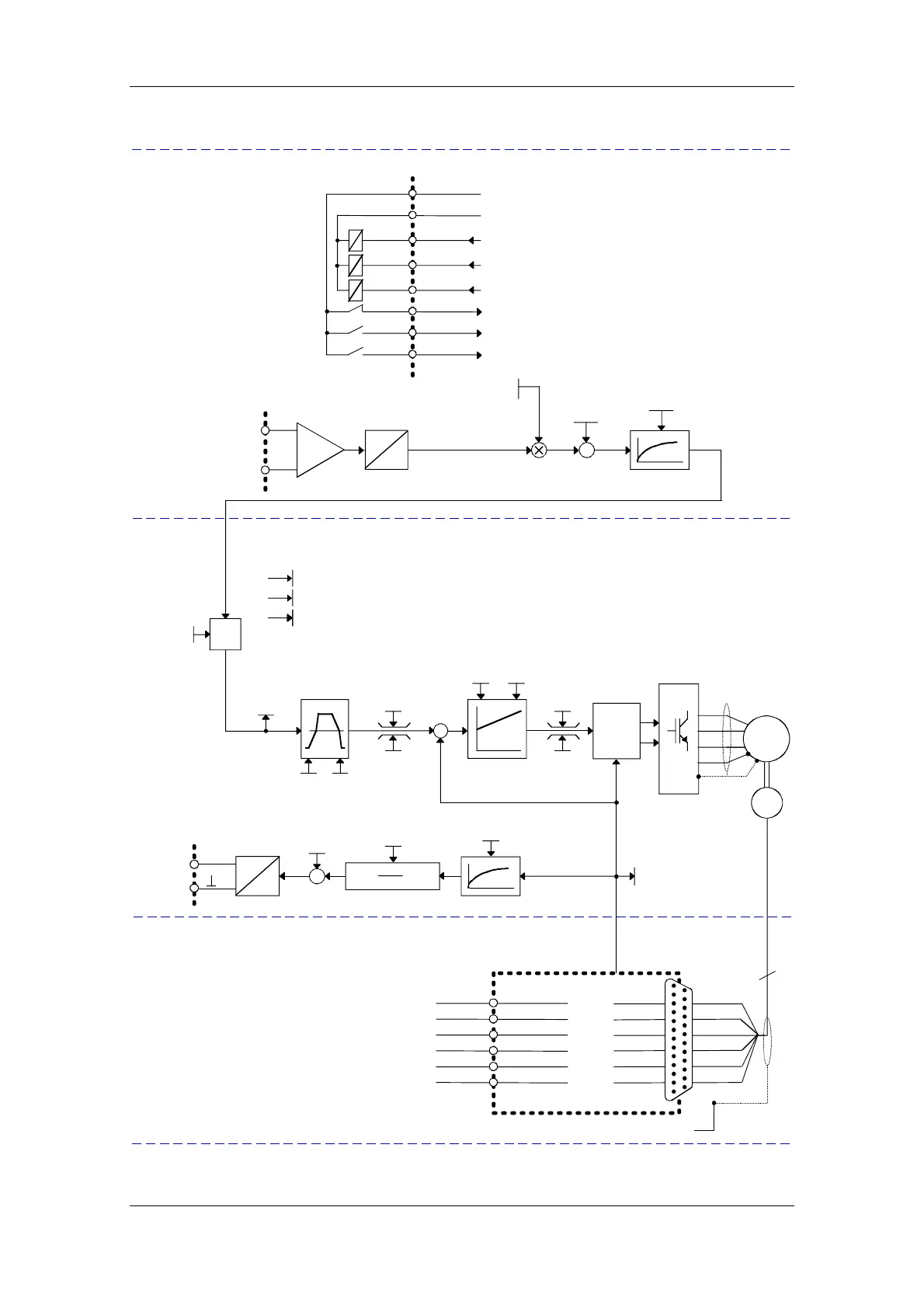
Data of resolver to be connected:
- 2-pole
Disp Speed Conn
r041.1
(= speed
setpoint)
Accel
Time P462.1
Decel
Time P464.1
n(max, FWD speed)
P452.1
n(max, REV speed)
P453.1
n-Reg. Gain1
P235.1
n-Reg. Time
P240.1
FSetp
Torq(Lim1)
P263.1
FSetp
Torq (Lim2)
P264.1
Current
control
Motor
encoder
Motor
3~
AnaOut Smooth
P642.1
AnaOut Scale
P643.1
AnaOut Offset
P644.1
A
D
+/- 10 V
-X101/11
y[V]= P643.1
x
100 %
Analog output
xy
-X101/12
AA
Disp Speed Conn
r041.2
(=speed actual value )
SBR1/2
-X414/3
6
Shield connection
Type of encoder:
Resolver
-X414/4
-X414/6
-X414/7
-X414/9
sin +
sin -
cos+
cos-
Excitation
M
Excitationg
-X414/11
Control type:
Speed
control
r003 Output Volts
r004 Output Amps
r006 DC Bus Volts
Ref-
speed
P353
Norm.
P24
M24
1 = Operation
0 = Fault
1-Edge = Acknowledge
1 = ON 0 = OFF1
-X101/1
1 = Inverter relesae
-X101/2
-X101/3
-X101/4
-X101/6
-X101/7
-X101/8
Setpoint and command source
Terminal strip and
analog input
0 = Alarm
-X101/5
AnaIn Scale
P630
Differential input
-X101/9
AnaIn Offset
P631
AnaIn Smooth
P634
+/- 10 V
A
D
-10 V ... + 10V
corresponds to
-100 % ... +100 %
-X101/10
AI+
AI-
-X410/95
-X410/93
-X410/94
-X410/91
-X410/92
-X410/90 Track A+
Track A-
Track B+
Track B-
Zero pulse +
Zero pulse -
Pulse encoder simulation:
(only for SBR2)
Data of pulse encoder simulation:
- 1024 pulses/revolution
 Loading...
Loading...









