09.2008 Communication / PROFIBUS
Siemens AG 6SE7087-6QX70 (Version AK)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.2-101
Linking the MASTERDRIVES MC to SIMOTION using standard
telegram 5.
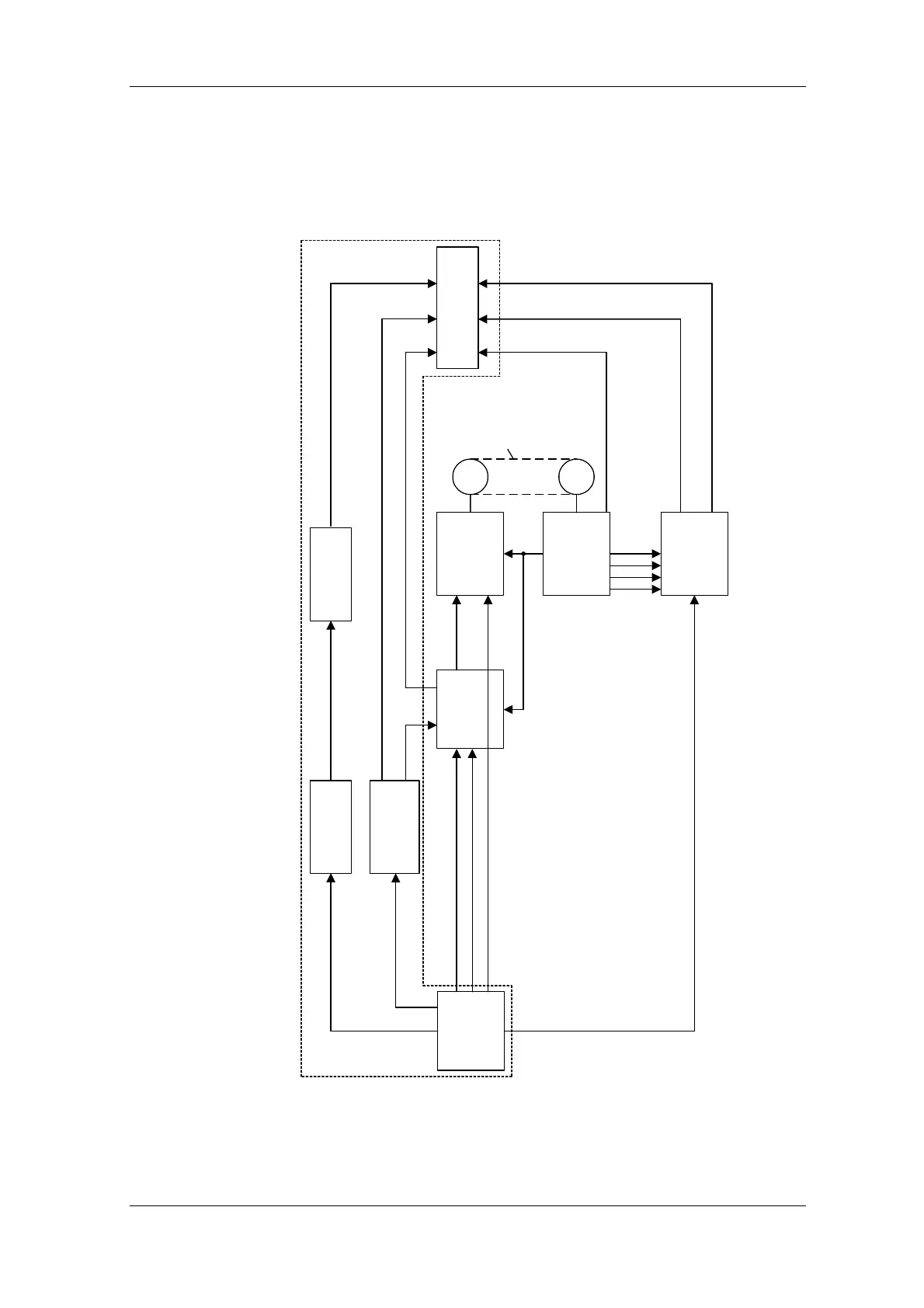
Fig. 8.2-34 shows an overview of the interconnection required for
standard telegram 5. This connection is made using the scriptfile on the
SIMOTION CD:
Control word 1
[FD 180]
acts on
Status word 1
[FD 200]
Status word 1 (K0032)
Transmit PROFIBUS-
signals [FD 125]
Monitor life sign
[FD 170]
DSC core
Fig. 8.2-36
Slave life sign (K0256)
Actual position value scanned in master application cycle (KK0526)
Position setpoint
(KK0457)
Position
control
[FD 340]
DSC-Position Xerr (KK3036)
Position control gain Kpc (KK3038)
Speed precontrol value (KK3032)
Receive
PROFIBUS
signals
[FD 120]
(KK3032)
M
Motor
G
Encoder
Position
sensing
Mech.
coupling
Position act.value
(KK0120)
Encoder
interface
[FD 172a]
Position measurement (KK0122), Position act.value
(KK0120), Reference value G1 (KK0124),
Encoder checkback signals (at U923.x)
Encoder 1 - Control word
(K3005 to parameter U921)
Control word 1
(B3100 to B3115)
Encoder 1 - Position act.value 2
(KK0912)
Encoder 1 - Status word (K0910)
Fig. 8.2-35
Master life sign (K3004)
Speed act-value (KK0091)
Fig. 8.2-34 Block diagram: MASTERDRIVES as PROFIdrive version 3 slave
Sample application
 Loading...
Loading...









