09.2008 Communication / PROFIBUS
Siemens AG 6SE7087-6QX70 (Version AK)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.2-105
KK
U097 (0)
KK KK0457
.01
.02
U951.91 = __ (20)
KK
.03
<1> Arithmetics in 2nd complement without evaluation
of carry and borrow.
No limitation is effected outside the number range
of 32 bits
Example 2
32
-1(+40000=39999 with Addition).
U400 (0)
KK
TT
Deceleration cycles
0 ... 32 sampling times
U401 (0)
KK0600
T
U950.63 = __ (20)
U443.01 (0)
KK
Number of shift steps
-31 ... +31
U442.01 (0)
KK0618
y = x * 2
n
n
n = 0...-31
Sign
0
031 1
n = 0...+31
xy
2
31
-1
-2
31
-1
U953.36 = __ (20)
KK3038
KK3032
KK3036
P203.B
K
P190.B
KK
P209.B
KK
KK0120
P734.6
K
U961.91 = 16
4
4
4
DSC_GAIN (KPC)
from: PROFIBUS
N_Setp (precontrol word)
DSC_POS (XErr)
G1IST1 (ActV)
To: PROFIBUS
U960.63 = 14
U442.01 = 12
U401 = 4
U963.36 = 18
Pos.Controller Kv
(1000LU/Min)/LU
P204.F = 15.728
FD340 (position
controller)
FD120 /125 (CBP2)
.01
U176 (0) U950.86 = __ (20)
KK0526
KK
U177 (0)
B
.02
KK
0
1
U960.86 = 13
4
B0243
LS MasterApPulse
K
P734.7
K3004
Receive LS [FD170]
B0234 set on each
new LS
Life sign (LS)
Pos Setp. Pos Cotnroller
Speed setpoint PosReg
Kp-adjustment PosContr
Interpolator
Ü = 2 ^P770
P770 (3) = -3
Max. jump for
Interpolator
P771 (0)
Interpolator
position
controller
FD340
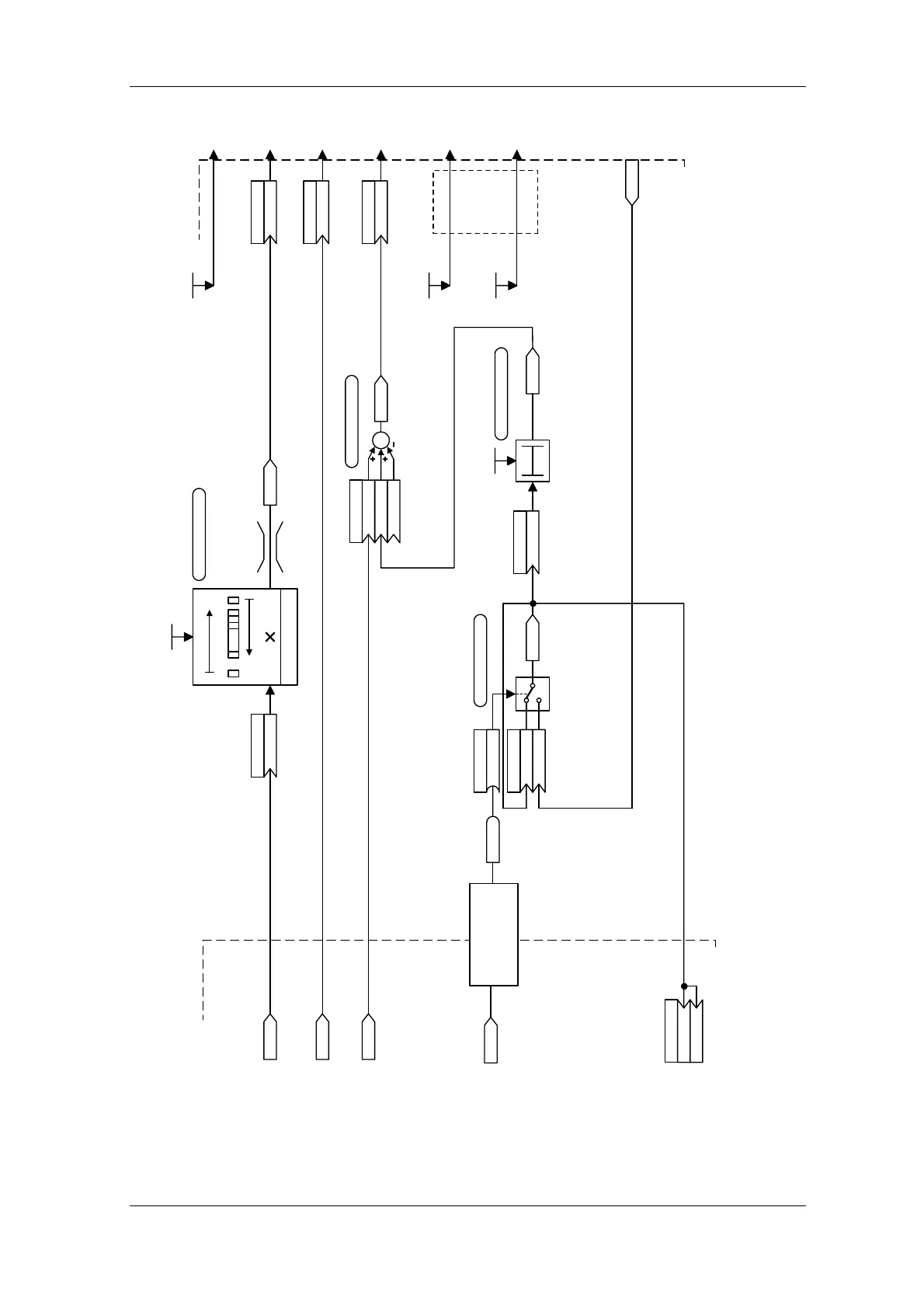
Fig. 8.2-36 DSC core
 Loading...
Loading...









