Communication / CBC 03.2010
6SE7087-6QX70 (Version AL) Siemens AG
8.4-2 Compendium Motion Control SIMOVERT MASTERDRIVES
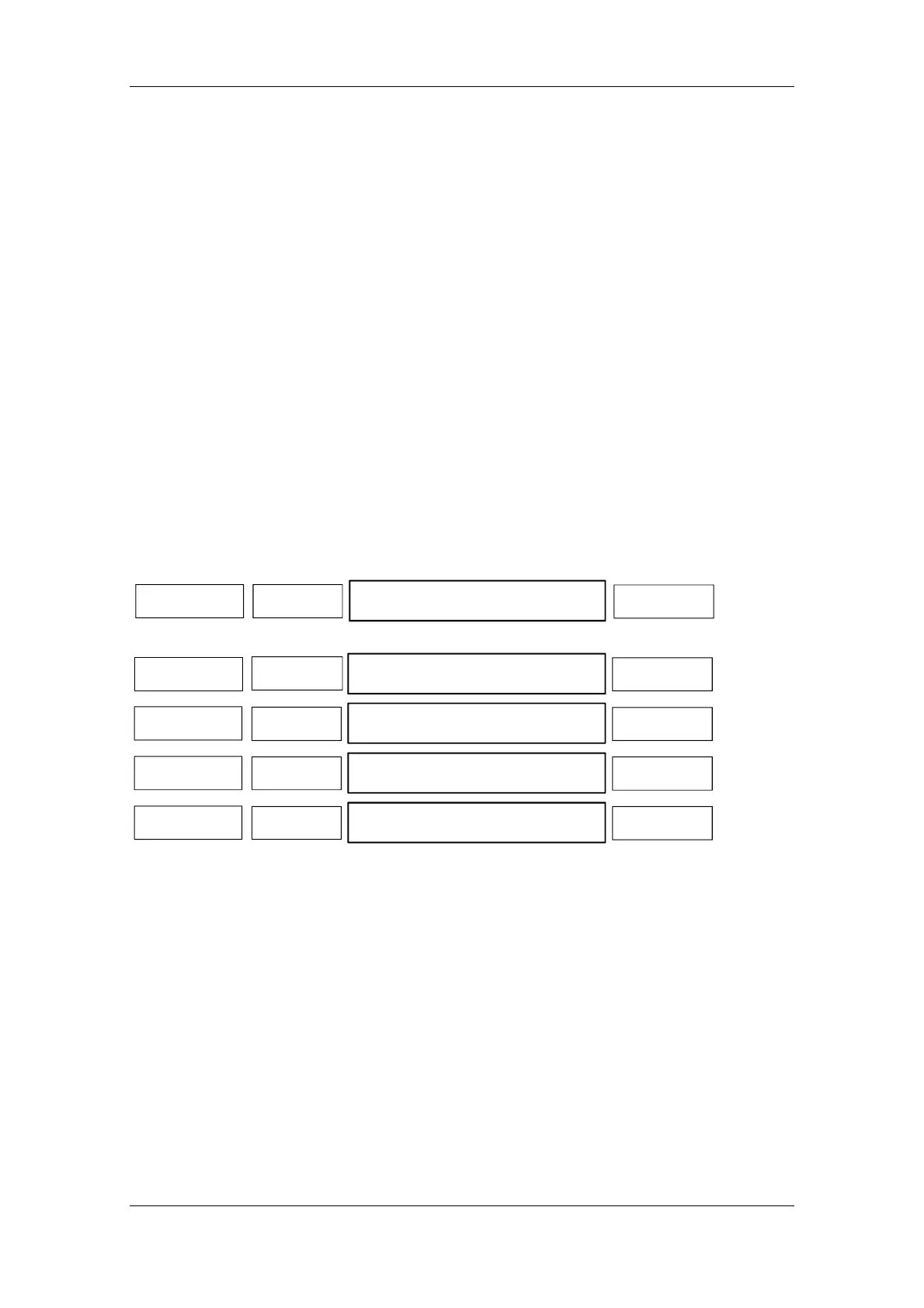
For the drives, VDI/VDE guideline 3689 specifies the net-data structure
with which a communications partner can access the drive slaves. The
net-data structure is divided into two areas:
♦ The process-data area, i.e. control words and setpoints or status
information and actual values
♦ The parameter area for reading/writing parameter values, e.g.
reading out faults and reading out information on the properties of a
parameter such as reading out min./max. limit values etc.
The number of process data (maximum 16) and activation of the
parameter interface is parameterized on the unit. The parameterization
of the net-data structure depends on the function of the drive within the
overall automation system. The process data are processed with the
highest priority and in the shortest time slices. The process data are for
controlling the drive within the overall automation system, e.g. power-
on/power-off, stipulation of setpoints, etc.
With the help of the parameter area, the user has free access to all
parameters in the converter (CU and, if necessary, the TB) via the bus
system. This facility can be used, for example, for reading out detailed
diagnostic information, fault messages and so on. Information for
visualizing the drive can thus be called using a higher-level system, e.g.
a PC, without affecting the transfer of process-data.
CAN
identifier
CAN
identifier
CAN
identifier
CAN
identifier
CAN
identifier
Net data (8 Bytes)
Process data (PZD) words 1...4
Net data (8 Bytes)
Parameter (PKW)
Net data (8 Bytes)
Process data (PZD) words 5...8
Net data (8 Bytes)
Process data (PZD) words 9...12
Net data (8 Bytes)
Process data (PZD) words 13...16
PKW: Parameter ID word
PZD: Process data
Protocol frame
(Header)
Protocol frame
(Header)
Protocol frame
(Header)
Protocol frame
(Header)
Protocol frame
(Header)
Protocol frame
(Trailer)
Protocol frame
(Trailer)
Protocol frame
(Trailer)
Protocol frame
(Trailer)
Protocol frame
(Trailer)
Fig. 8.4-2 Structure of the net data in the telegrams of the CAN protocol
 Loading...
Loading...









