Communication / CBC CANopen Communication Board 02.2004
6SE7087-6QX70 (Version AD) Siemens AG
8.5-80 Compendium Motion Control SIMOVERT MASTERDRIVES
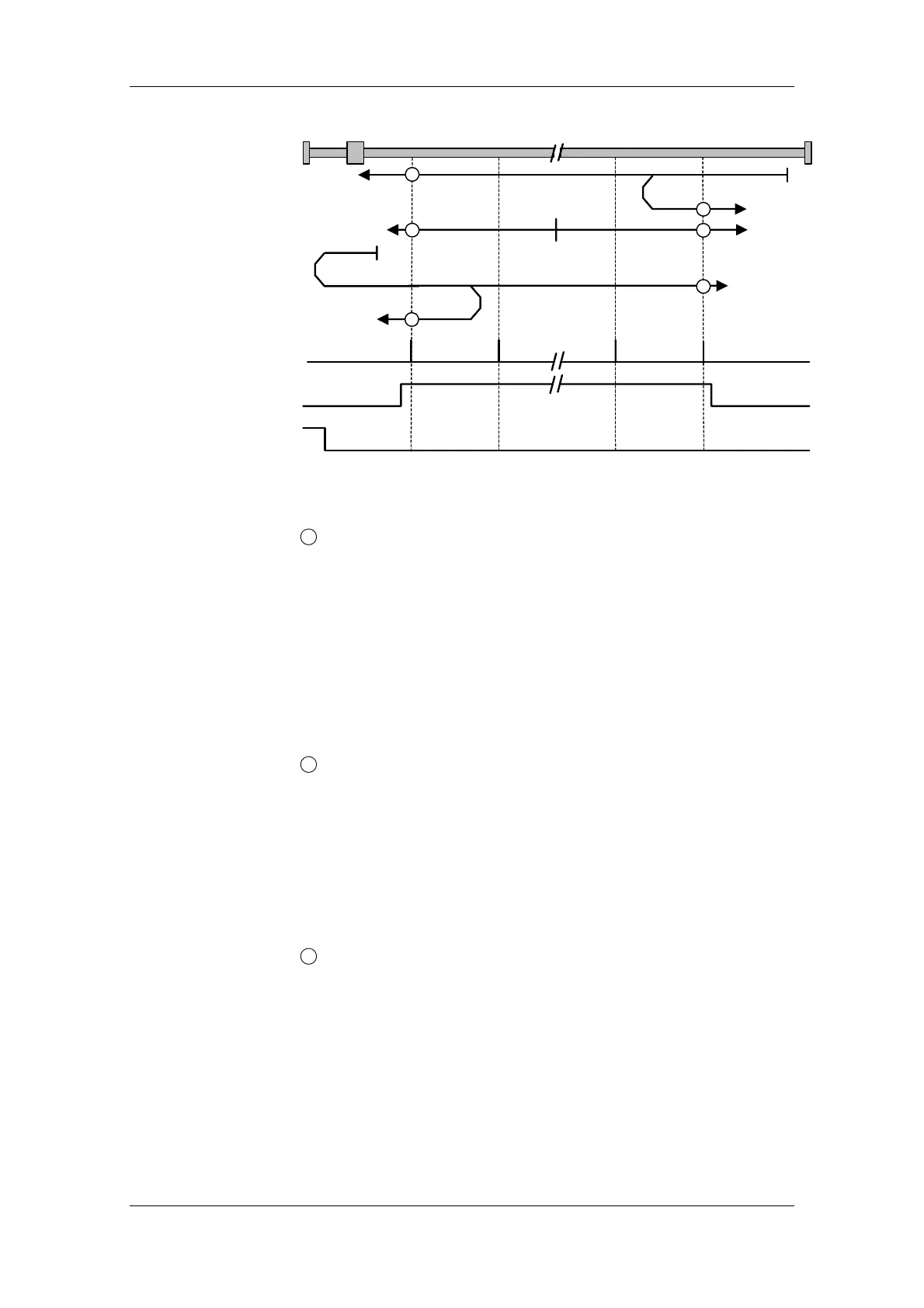
Home Switch
Index Pulse
Negative Limit
Switch
14
14
14
11
11
11
Fig. 8.5-9 Homing_methods 11 and 14
11
The axis is positioned to the right of the Bero. The homing operation
is started by bit 4 in the control word.
The axis traverses under speed control at homing approach velocity v
A
[MD7] towards the Bero. When the Bero responds, the axis decelerates
down to homing creep velocity v
R
[MD6] and reverses its direction of
rotation. When it exits the Bero in the positive direction, it searches for
the next zero pulse of the position encoder. When the zero pulse is
found, the axis is braked to a standstill under speed control. It retraces
the deceleration path traveled as a result of the braking operation by
executing a position-controlled return motion (positioning) towards the
zero pulse. The axis then activates "Homing Attained" in the status
word via bit ARFD.
11
The axis is positioned on the Bero installed as a homing switch. The
homing operation is started by bit 4 in the control word.
The axis traverses under speed control at homing creep velocity v
R
[MD6] in a positive direction. When it exits the Bero in the positive
direction, it searches for the next zero pulse of the position encoder.
When the zero pulse is found, the axis is braked to a standstill under
speed control. It retraces the deceleration path traveled as a result of
the braking operation by executing a position-controlled return motion
(positioning) towards the zero pulse. The axis then activates "Homing
Attained" in the status word via bit ARFD.
11
The axis is positioned to the left of the Bero. The homing operation
is started by bit 4 in the control word.
The axis traverses under speed control at homing approach velocity v
A
[MD7] towards the negative limit switch (reversal cam). When the cam
responds, the axis changes its direction of rotation and travels towards
the Bero. When the Bero responds, the axis decelerates down to
homing creep velocity v
R
[MD6]. When it exits the Bero in the positive
direction, it searches for the next zero pulse of the position encoder.
When the zero pulse is found, the axis is braked to a standstill under
Homing_methods 11
and 14
 Loading...
Loading...









