08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-41
The position correction is used to correct the actual position by a
certain value. [330.5], [335.5]
The position correction is used mainly for:
♦ Rotary axis operation with angular synchronization [836.7] and
positioning [815.5]. The correction is performed with an overflow
from 360° to 0°.
♦ The tool offset during positioning
The control signals for adding and subtracting the position correction
operate as follows:
Position correction: Actual position
→ Added Actual position = actual position + pos. correction
→ Subtracted Actual position = actual position - pos. correction
The position correction value can be positive or negative.
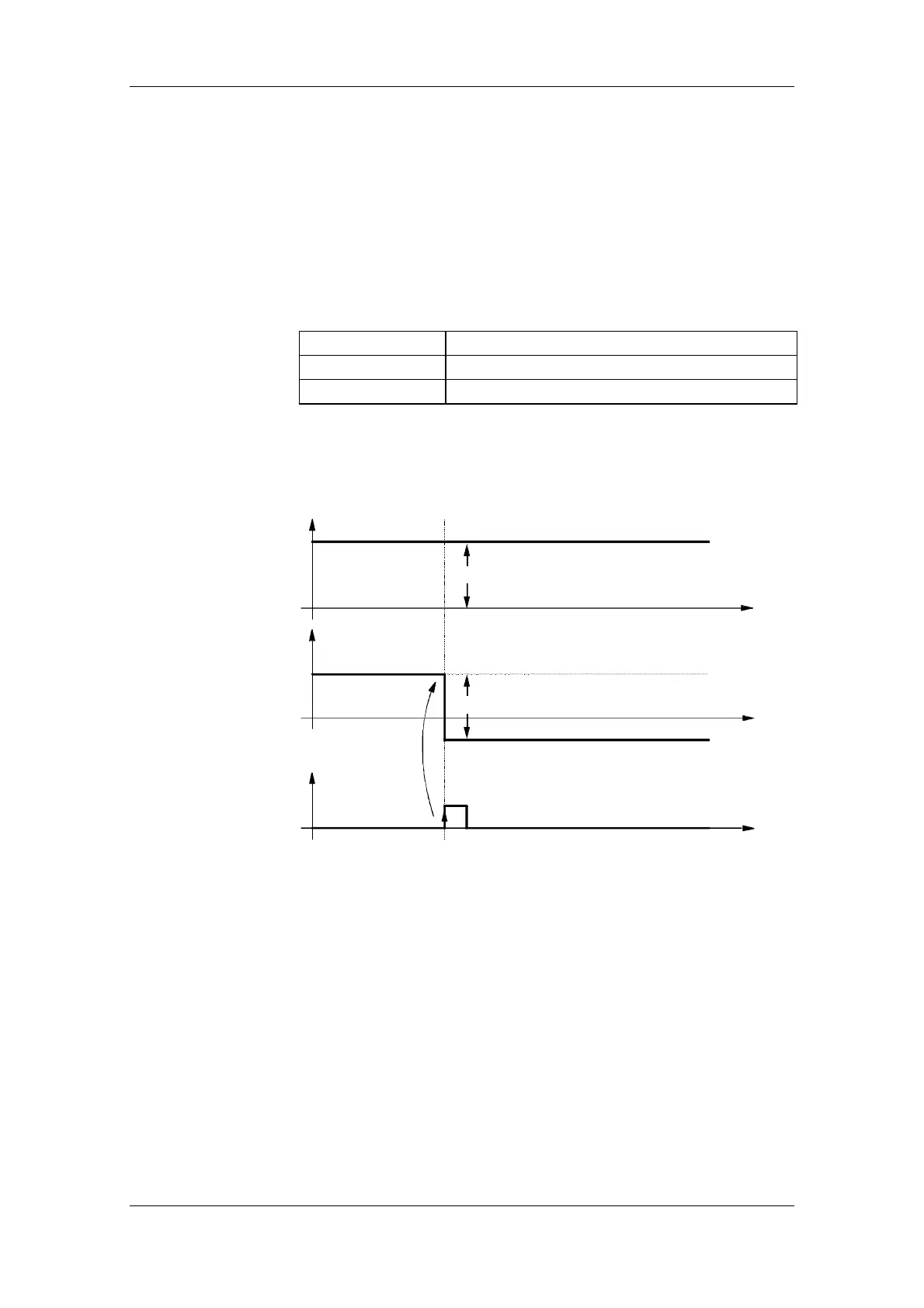
The time chart below illustrates the signal sequence during position
correction.
Position correction
Actual position
t
t
t
Δ
Δ
Subtract position
correction
Fig. 9-16
Position correction
P174/P175
 Loading...
Loading...









