08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-49
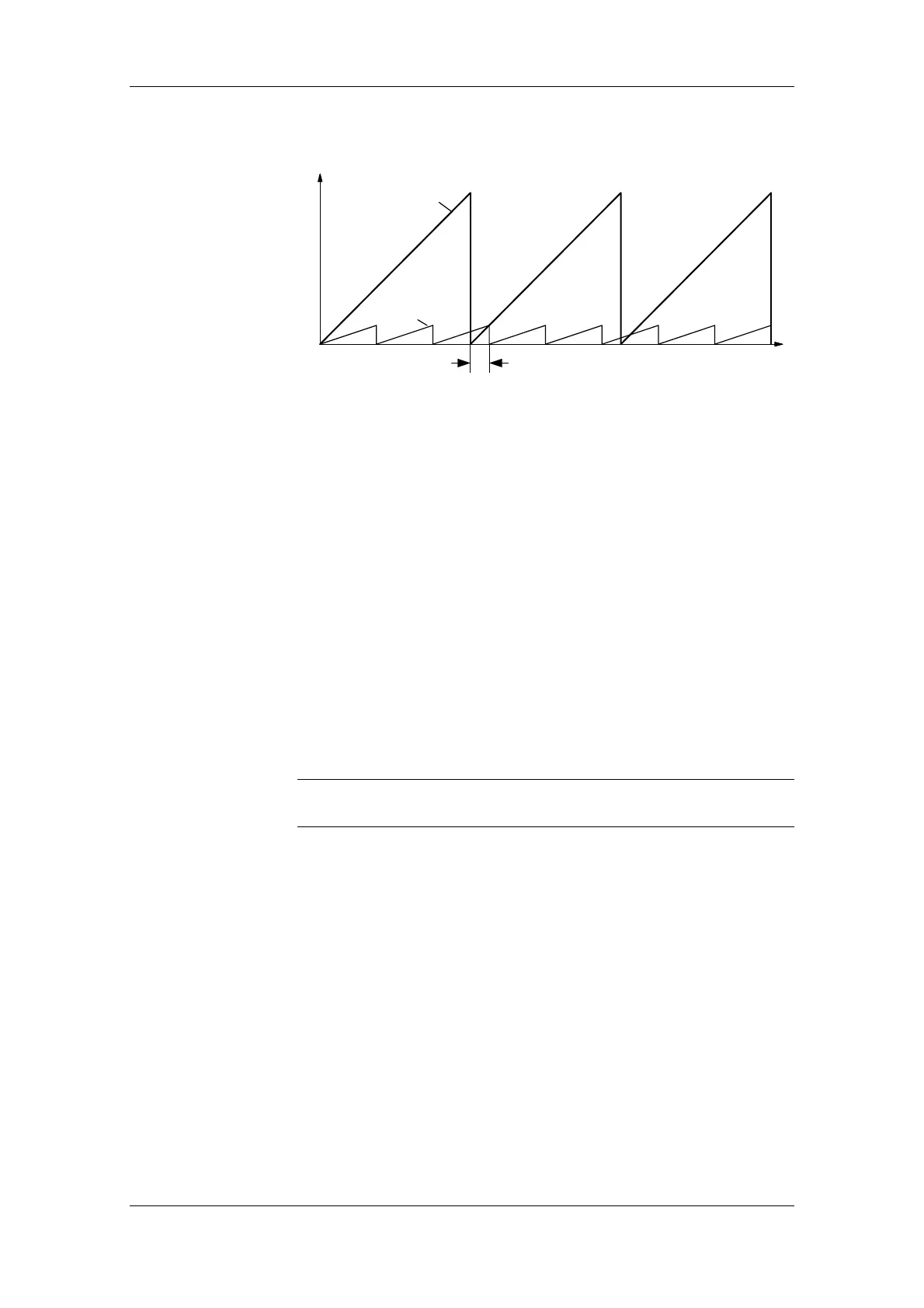
Example: Gear ratio 1:3, absolute encoder can count 8 revolutions
12
3
456780910
11
12 13 14 15 16
1
2
3
4
5
6
7
Absolute encoder
position
Load position
Displacement per encoder overflow
8
Position
Motor
position
1817 19 20 21 22 23 24
In this case, a load-side offset of 1/3 of a load revolution occurs on
each encoder overflow, after three encoder overflows the motor and
load zero position coincide again. The load position can no longer be
reproduced with certainty after an encoder overflow.
When torque motors are employed, a gear unit may be installed
between the encoder axis and the motor axis. This gear ratio can be
parameterized in P116. This parameter is included in the calculation of
the load offset mentioned above.
In order additionally to reproduce the position of the load for any gear
ratios, the free block "Start position absolute encoder" is used with
mechanical gear ratios (function diagram 327 for motor encoder,
function diagram 333 for external encoder). The block counts the
encoder overflows using the absolute position. The overflow and
revolution counter for retentive storage in an tracking memory element
is accessed via connector KK625 (KK628). When the module is
powered up, the overflow and revolution counter is accessed from the
tracking memory element. The starting position for position acquisition
is calculated from the absolute position using this information.
The visualization parameters in the position tracking block refer
exclusively to the encoder data.
The mechanical gear ratio is given by parameter U810 (U795). U810.01
(U795.01) gives the number of gear teeth on the motor side, and
U810.02 (U795.02) the number of gear teeth of the load side. It is
important to give the numbers of gear teeth, not the circumferences.
Motor encoder
position tracking
block
NOTE
 Loading...
Loading...









