08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-77
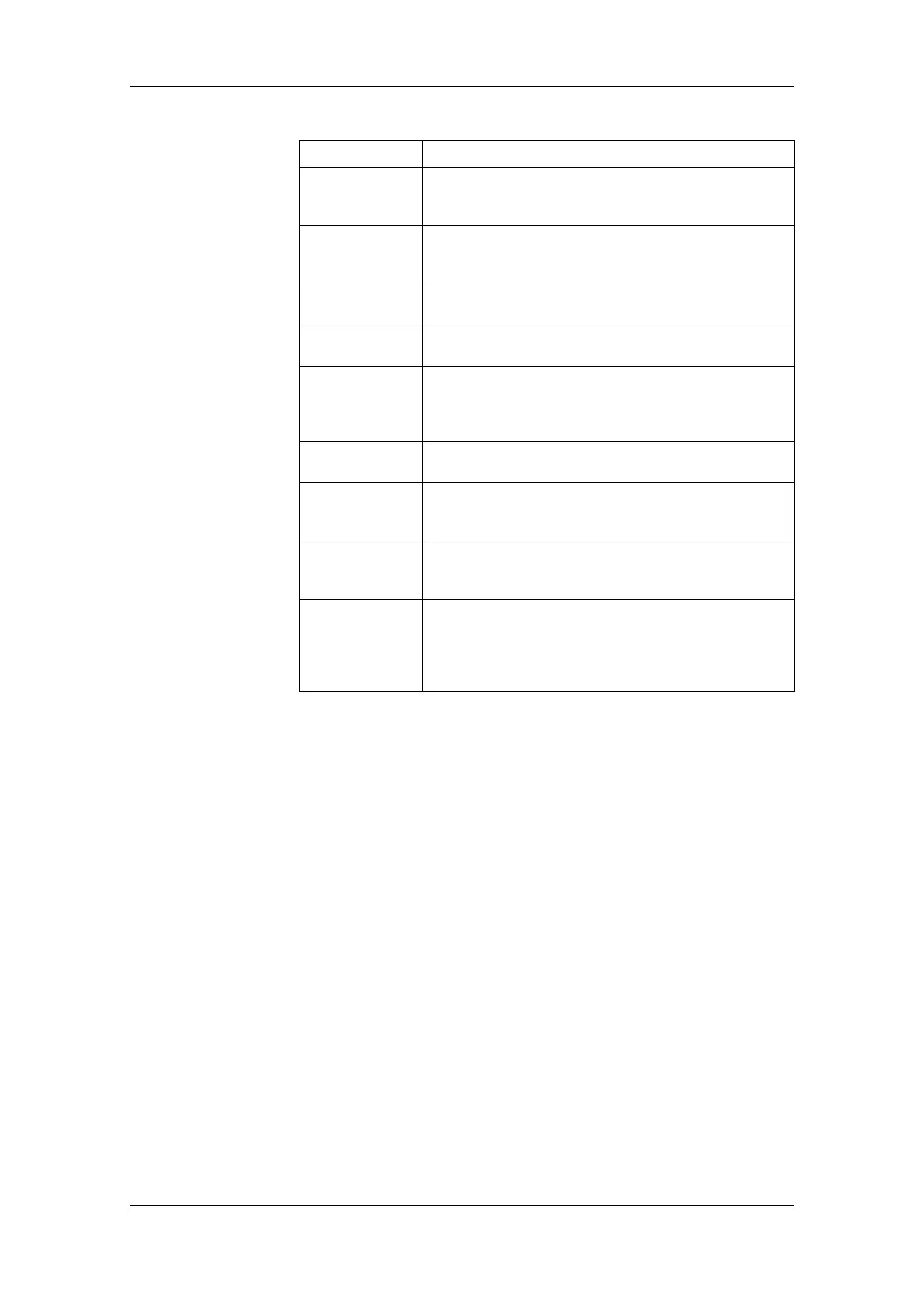
Function Use
Engaging cycle
[834]
For drives that are normally stationary and are only started
up for one operation (e.g. one machine cycle) in
synchronization mode.
Disengaging cycle
[834]
For drives that are normally used in synchronization mode
and are only stopped for one operation (e.g. one machine
cycle).
Gearbox function
[835]
For drives requiring a transmission ratio between the
master and slave axis.
Cam [839]
For drives whose sequence of movements is to be stored
in a table.
Position
correction [843]
A position correction can be superimposed on an angular
synchronization. The position correction references the
angular synchronization with external synchronization
markers, e.g. pass marks.
Referencing [843]
Referencing "on the fly" to a reference index (e.g. BERO)
during synchronization mode
Synchronization
to master value
[841]
Synchronization of the zero position of the slave axis to
that of the master axis via a parameterizable
compensation movement.
Displacement
setting [841]
Setting of a random size of offset (displacement) angle as
a fixed value or in inching mode (motorized potentiometer
function)
Catch-up [837]
Coupling a drive up to and out of a synchronized drive
system.
The coupled-out drive can be autonomously operated at
local speed and can be accurately halted at a specified
position.
The following section describes some important terms used in angular
synchronization:
Master drive
The master provides the path setpoint for the synchronization block.
There are two types of master: real and virtual.
With a
real master [833], the master position is detected by an
encoder system, e. g. by a master pulse generator mounted on an
upstream mechanical component. The measured position is the path
setpoint for the synchronization block.
Advantage: The slave always follows the master.
Disadvantage: Load impacts and corrections affect the slave
directly.
With a
virtual master, an ideal position ramp is generated. This ramp
is distributed to all drives. Even the master drive is synchronized with
the virtual master.
Advantage: Synchronization has greater overall stability,
since load impacts on the master drive no
longer affect the slave drive.
Disadvantage: The master drive itself has to be synchronized.
Definitions
 Loading...
Loading...









