08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-141
Start several homing procedures for both drives, as described in step 9.
Set the home position offsets with machine data MD4 = U501.04 by
trial and error starting with value "0" until the desired starting position
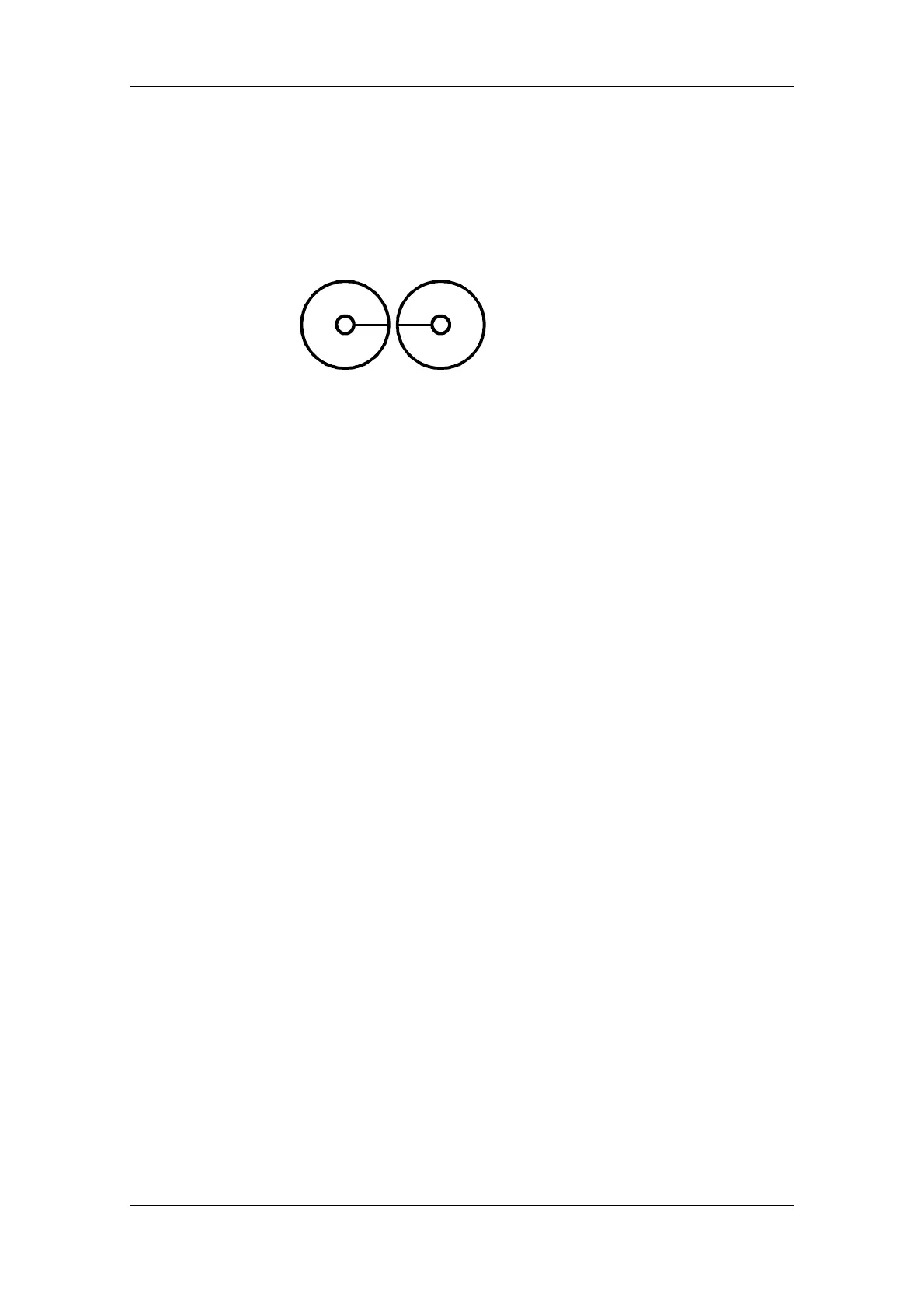
for the synchronization is reached (a reminder: a value of 3600 LU in
MD4 means one motor revolution). With the 2-axis demonstration pack,
the start position is as follows on the two flywheels:
Fig. 9-49 Start position for synchronization with 2-axis demonstration pack
In this start position, you will see the LED through the drilled holes on
both wheels.
When you have configured a suitable MD4 setting on both drives,
please proceed as follows in order to test the synchronization via
SIMOLINK:
a) Set 0 V on the setpoint potentiometer of drive 2; this corresponds to
a velocity setpoint of 0 %.
b) Perform the homing procedure for both drives, in order to establish
the start position in the sketch above (→ with the 2-axis
demonstration pack, the LED beam must be visible through both
flywheels).
c) Cancel the start command for both drives (START = 0). Both drives
are now in the start position, position-controlled.
d) Start the synchronization on the slave drive (drive 1) with
START = 1. It does not yet start to move, because the virtual master
on drive 2 has not yet been enabled, and defines a path setpoint of
"0".
e) Start the master drive with START = 1 (drive 2). This activates the
enable signal for the virtual master axis.
f) You can now start both drives with the potentiometer and modify the
speed (0...10 V equals 0...MD23 equals 2778 min
-1
in r230 [360]).
g) With all speeds, the LED beam should be visible through both
flywheels if the synchronization is operating correctly.
Application example 2 is now complete. When you have worked
through all the steps in application example 2, you will have a sound
overview of the "positioning" and "synchronization" functions and their
connection and commissioning. You will have also received an
introduction to the documentation available in an easy-to-understand
example. The further steps required to commission your own
customized application should now be much easier.
Establishing the
correct start
position through
homing
Testing the
synchronization
function
End of application
example 2
 Loading...
Loading...









